

SERG
-
Постов
755 -
Зарегистрирован
-
Посещение
-
Победитель дней
8
Тип контента
Профили
Форумы
Календарь
Сообщения, опубликованные SERG
-
-
В ветке по КПП02 ответил. ЦП сделает "превед"
Но действительно не могу представить как можно замкнуть провод на +12. Это же целенаправленно надо будет тащить этот провод к плюсу АКБ. На массу еще понимаю (ничего не будет), а вот на +12 как???
былобы куда, а как вопрос уже третий...
да и решение проблемы очень простое, тоисть предусмотреть возможную ситуацию гораздо проще нежели потом владелец авты будет в полном ступоре...
тоисть покупать новый, но только из-за того что производитель поленился побеспокоиться об этом заранее.
-
причем именно к акб,так как оголенных проводов плюсовых на авто нету
ты розсматриваешь линию датчика как отдельную от всех проводов в автомобиле, на самом деле это часть общей проводки.
-
такое наверное только из за неправильного монтажа может произойти?
в процессе эксплуатации замкнуть один из трех проводов датчика на плюс акб будет тяжеловато
у меня сто, и кроме всего прочего сам занимаюсь электрикой.
поверь я чего только неповидал...
настолько немыслимые бывают ситуации.
-
в теме по первому варианту уже отписался, но хочеться и здесь прочесть ответ.
вопрос в лоб- что будет в случае замыкания на 12 вольт любого из входов датчика???
ситуация не из повседневных, но исключать её вероятность нельзя. авто есть авто...
вопрос- как-то такая ситуация здесь исправлена или нет?
-
вопрос в лоб- что будет в случае замыкания на 12 вольт любого из входов датчика???
ситуация не из повседневных, но исключать её вероятность нельзя. авто есть авто...
ответ- кирдык контролеру.... и все из-за того что у вас входы датчиков неимеют на входе делителя...
-
вариантов радиоуправления более чем достаточно, но не всегда это функционально законченые девайсы.
и за правило те что имеют больше возможностей еще неокультурены....
-
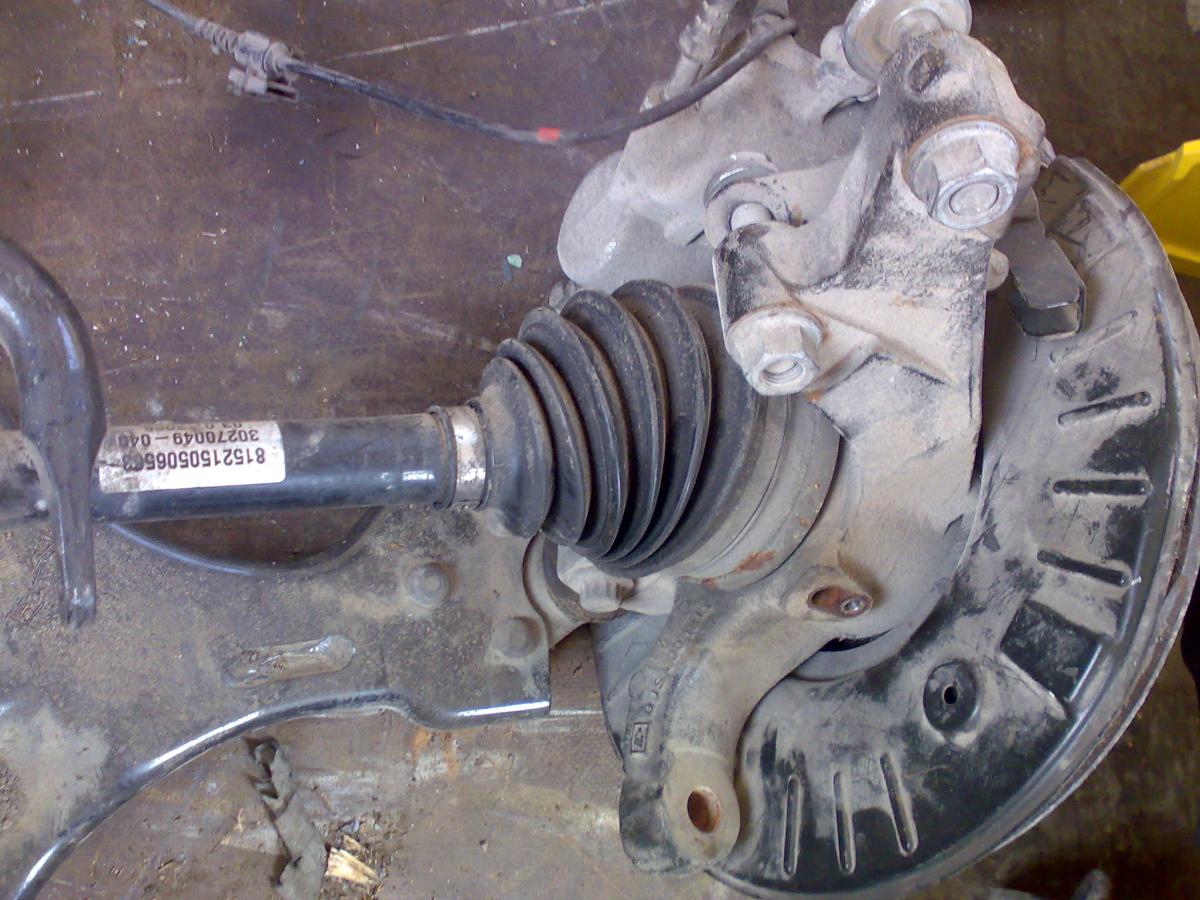
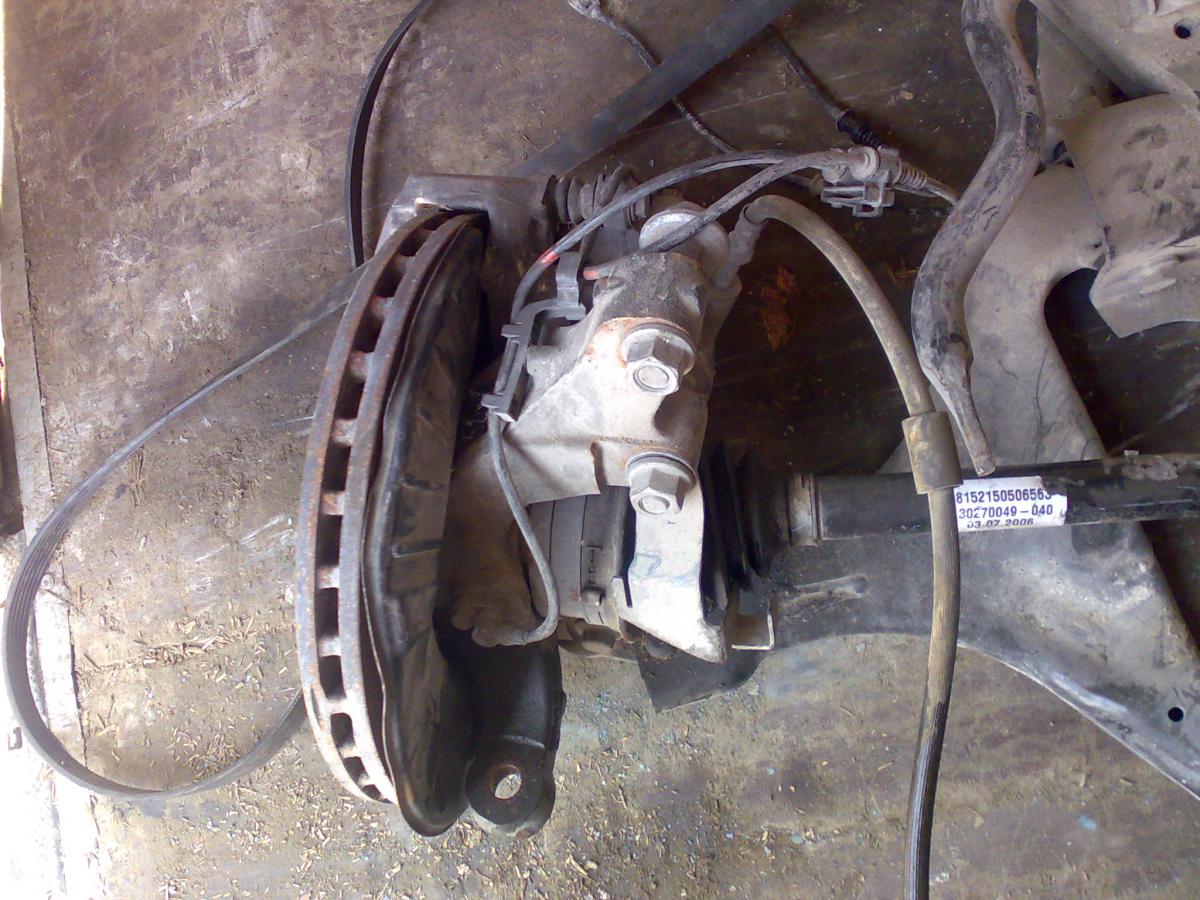
точно не скажу,
надо смотреть как там устроена передняя стойка,
(по заду я думаю там все одинаково)
вот фото цапфы с полноприводного 639....


из которых видно что стойка таже и работает точно так-же как и на заднеприводном 639...
-
Чёто я сомневаюсь , что у ТС это стоит.....
У него клапана такие , что с контроллером не будут работать адекватно.
Я имею ввиду пропускную способность.
Про дроссели он вроде не писал ничего.
Подождём ......
насчет стоит сейчас или нет незнаю, но стояло ранее это точно.
да и на первом фото это его борода, ну точнее центральный тонель....
ну а так, то да. пусть автор поведает че да как....
-
Дык а чего очередь не занимаете?
дык, так я давича бесплатную версию аналога выложил к самостоятельной сборке...
макет уж сутки работает....
поэтому мне незачем он эт уж точно....
-
-
Одна штука в том что на 4 реле никак не постороишь 4-контурную систему.
тупонул.... 8 реле.... шо значит поздняя ночь....
с вчерашшнего дня макет включен. аки работает....
тоисть имитирую работу датчиков а оно управляет релюхами.
но повторяюсь, в реальных условиях на автомобиле проверить немогу из-за отличий в клапанах, у меня не 8 клапанная система..
-
Я встречал некий гибрид галетника с энкодером. Т.е. выдется не постоянное замыкание, а импульс. Но в любом случае это реализуется Ж) Один чип (скажем ПИК простейший с ядром 12хххх), который смотрит заположением галетника и при изменении его состояния коммутирует релюшками выходной импульс нужной длительности итп
зачем релюшками, если с головой хватит оптронов. дешевле релюх и безшумная комутация...
-
нее,халявы не надо,можно и за 100 и за 200уе,главное чтоб все собранно ,работало,настраивалось и програмировалось=)
на самом деле все очень просто с настройкой, темболее по умолчанию уже есть предустановки.
при его себестоимости он может быть отладочным.
я ведь неговорю что это полноценный контролер с кучей настроек и всяких плюшек, но в тоже время он может поддерживать заданый уровень...
-
Хех, какое совпадение, я тоже смотрел на Ардуино, но только на модель Мега 1280 или 2560.
PS. Цена того что представлена в начале темы стоит приблизительно 530 грн. или 66 долл.
неа, около 50 долларов, где диисплей 5 баксов, ардуина 20 баксов, росширитель 13, блок реле 12 баксов. итого получаем 50 баксов.
а если руки не из жо, то бюджет можна еще меньше сделать, до баксов 30 смело можна затратную часть уменьшить.
для данного контролера и этого камня замного...
-
недавно на одном из форумов посвященных ардуине была выложена прошивка для управления 4 контурной пневмой по 8 клапанной схеме.
вот думаю может кому пригодится.
я немного её изменил, но совсем чуть-чуть,
собрал макет на столе и проверил на общую работоспособность. работает.
в реальных условиях увы проверить немогу ибо иная схема управления клапанами, поэтому только на макете.
датчики подходят любые с выходным наряжением от 0 до 5 вольт.
состав- ардуино нано или любая другая. вплоть до просто микроконтролера с необходимой обвязкой, двухстрочный дисплей, розширитель портов для подключения дисплея, четыре реле управления клапанами и две кнопки без фиксации для выбора режима работы.
три уровня собственно прописываются в самой прошивке.
есть диагностика датчиков на обрыв и диагностика по изменению уровня и его поддержания.
есть блокировка работы автоматической поддержки уровней.
для выбора предустановленых уровней используется две кнопки, они- же и для блокировки.
одна кнопка перебирает уровни снизу вверх а вторая сверху вниз, одновременное нажатие обеих переводит в режим блокировки.
на дисплей выводятся показания датчиков до выхода на выбраный уровень и собственно название уровня. по достижению уровня вместо показаний датчиков высвечивается надпись *установлено*.
режиме блокировки надпись *система заблокирована*
если определяется обрыв датчика то на дисплее надпись- *обрыв датчика* с указанием самого датчика.
если за отведенное время уровень ненастроен то на дисплее надпись- *авария* с указанием контура.
при желании ничего не мешает добавить контроль акб и работу с датчиком давления для управления компрессором...
собственно состав-
блок реле

дисплей

росширитель портов для дисплея

и сама ардуика

ну и сама прошивка-
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
LiquidCrystal_I2C lcd(0x27,16,2);
int state=0;
int state2=0;
int state3=0;
int state4=0;
int state5=0;
int avaria=0;
int avaria2=0;
int avaria3=0;
int avaria4=0;
int ustanovka=0;
int ustanovka2=0;
int ustanovka3=0;
int ustanovka4=0;
long previousMillis = 0;
long previousMillis2 = 0;
long previousMillis3 = 0;
long previousMillis4 = 0;
long previousMillis5 = 0;
int obriv = 0;
int obriv2 = 0;
int obriv3 = 0;
int obriv4 = 0;
#include <EEPROM.h>
int dveknopky=0;
int predustanovka=0;
int regim=1;
int eeprom=0;
int knopka=0;
int knopka2=0;
int knopka3=0;
int analog=0;
int analog2=0;
int analog3=0;
int analog4=0;
int sek=0;
int sek2=0;
int sek3=0;
int sek4=0;
int flag1=0;
int flag2=0;
int flag3=0;
int flag4=0;
void setup()
{
pinMode(0,INPUT);
pinMode(1,INPUT);
pinMode(2,INPUT);
pinMode(3,INPUT);
digitalWrite(0, HIGH);
digitalWrite(1, HIGH);
digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
lcd.init();
lcd.backlight();
pinMode(2,INPUT);
pinMode(3,INPUT);
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
pinMode(7,OUTPUT);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(11,OUTPUT);
}
void loop()
{
if (millis() -previousMillis5 >=100)
{
previousMillis5 = millis();
state5=!state5;
if(state5==1)
{
lcd.clear();
}
}
if(eeprom==0)
{
regim=EEPROM.read(0);
eeprom=1;
}
if(digitalRead(2)==HIGH&&digitalRead(3)==HIGH&&knopka3==0)
{
knopka3=1;
}
if(digitalRead(2)==LOW&&digitalRead(3)==LOW&&knopka3==1)
{
dveknopky=dveknopky+1;
if(dveknopky>1)
{
dveknopky=0;
}
if(dveknopky<0)
{
dveknopky=1;
}
knopka3=0;
delay(500);
}
if(dveknopky==1)
{
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
digitalWrite(6,HIGH);
digitalWrite(7,HIGH);
digitalWrite(8,HIGH);
digitalWrite(9,HIGH);
digitalWrite(10,HIGH);
digitalWrite(11,HIGH);
lcd.setCursor(2,1);
lcd.print("ZABLOKIROVANA");
lcd.setCursor(4,0);
lcd.print("SISTEMA");
}
else
{
if(analogRead(0)<=1010&&analogRead(1)<=1010&&analogRead(2)<=1010&&analogRead(3)<=1010)
{
if(digitalRead(2)==HIGH&&knopka==0)
{
knopka=1;
avaria=0;
}
if(digitalRead(2)==LOW&&knopka==1)
{
knopka=0;
regim=regim+1;
if(regim>3)
{
regim=3;
}
EEPROM.write(0,regim);
sek=0;
}
if(digitalRead(3)==HIGH&&knopka2==0)
{
knopka2=1;
avaria=0;
}
if(digitalRead(3)==LOW&&knopka2==1)
{
knopka2=0;
regim=regim-1;
if(regim<1)
{
regim=1;
}
EEPROM.write(0,regim);
sek=0;
}
if(regim==1)
{
predustanovka=300;
if(avaria==0&&avaria2==0&&avaria3==0&&avaria4==0)
{
lcd.setCursor(4,0);
lcd.print("nigniy");
}
}
if(regim==2)
{
predustanovka=600;
if(avaria==0&&avaria2==0&&avaria3==0&&avaria4==0)
{
lcd.setCursor(4,0);
lcd.print("sredniy");
}
}
if(regim==3)
{
predustanovka=900;
if(avaria==0&&avaria2==0&&avaria3==0&&avaria4==0)
{
lcd.setCursor(4,0);
lcd.print("verhniy");
}
}
if(flag1==1)
{
if (millis() -previousMillis >=500)
{
previousMillis = millis();
state=!state;
if(state==1)
{
sek++;
}
if(sek>=30)
{
sek=30;
}
}
}
analog=analogRead(0);
if(analog>999)
{
analog=999;
}
if(analog<100)
{
analog=100;
}
if(analog>(predustanovka+5)&&sek>=3)
{
flag1=1;
if(sek<30)
{
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
}
else
{
avaria=1;
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
}
}
if(analog>=(predustanovka-10)&&analog<=(predustanovka+10))
{
ustanovka=1;
avaria=0;
flag1=0;
digitalWrite(4,HIGH);
digitalWrite(5,HIGH);
sek=0;
}
else
{
ustanovka=0;
flag1=1;
}
if(analog<(predustanovka-5)&&sek>=3)
{
flag1=1;
if(sek<30)
{
digitalWrite(5,HIGH);
digitalWrite(4,LOW);
}
else
{
avaria=1;
digitalWrite(5,HIGH);
digitalWrite(4,HIGH);
}
}
if(flag2==1)
{
if (millis() -previousMillis2 >=500)
{
previousMillis2 = millis();
state2=!state2;
if(state2==1)
{
sek2++;
}
if(sek2>=30)
{
sek2=30;
}
}
}
analog2=analogRead(1);
if(analog2>999)
{
analog2=999;
}
if(analog2<100)
{
analog2=100;
}
if(analog2>(predustanovka+5)&&sek2>=3)
{
flag2=1;
if(sek2<30)
{
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
}
else
{
avaria2=1;
digitalWrite(6,HIGH);
digitalWrite(7,HIGH);
}
}
if(analog2>=(predustanovka-10)&&analog2<=(predustanovka+10))
{
ustanovka2=1;
avaria2=0;
flag2=0;
digitalWrite(6,HIGH);
digitalWrite(7,HIGH);
sek2=0;
}
else
{
ustanovka2=0;
flag2=1;
}
if(analog2<(predustanovka-5)&&sek2>=3)
{
flag2=1;
if(sek2<30)
{
digitalWrite(7,HIGH);
digitalWrite(6,LOW);
}
else
{
avaria2=1;
digitalWrite(6,HIGH);
digitalWrite(7,HIGH);
}
}
if(flag3==1)
{
if (millis() -previousMillis3 >=500)
{
previousMillis3 = millis();
state3=!state3;
if(state3==1)
{
sek3++;
}
if(sek3>=30)
{
sek3=30;
}
}
}
analog3=analogRead(2);
if(analog3>999)
{
analog3=999;
}
if(analog3<100)
{
analog3=100;
}
if(analog3>(predustanovka+5)&&sek3>=3)
{
flag3=1;
if(sek3<30)
{
digitalWrite(9,HIGH);
digitalWrite(8,LOW);
}
else
{
avaria3=1;
digitalWrite(9,HIGH);
digitalWrite(8,HIGH);
}
}
if(analog3>=(predustanovka-10)&&analog3<=(predustanovka+10))
{
ustanovka3=1;
avaria3=0;
flag3=0;
digitalWrite(8,HIGH);
digitalWrite(9,HIGH);
sek3=0;
}
else
{
ustanovka3=0;
flag3=1;
}
if(analog3<(predustanovka-5)&&sek3>=3)
{
flag3=1;
if(sek3<30)
{
digitalWrite(8,HIGH);
digitalWrite(9,LOW);
}
else
{
avaria3=1;
digitalWrite(8,HIGH);
digitalWrite(9,HIGH);
}
}
if(flag4==1)
{
if (millis() -previousMillis4 >=500)
{
previousMillis4 = millis();
state4=!state4;
if(state4==1)
{
sek4++;
}
if(sek4>=30)
{
sek4=30;
}
}
}
analog4=analogRead(3);
if(analog4>999)
{
analog4=999;
}
if(analog4<100)
{
analog4=100;
}
if(analog4>(predustanovka+5)&&sek4>=3)
{
flag4=1;
if(sek4<30)
{
digitalWrite(10,HIGH);
digitalWrite(11,LOW);
}
else
{
avaria4=1;
digitalWrite(10,HIGH);
digitalWrite(11,HIGH);
}
}
if(analog4>=(predustanovka-10)&&analog4<=(predustanovka+10))
{
ustanovka4=1;
avaria4=0;
flag4=0;
digitalWrite(11,HIGH);
digitalWrite(10,HIGH);
sek4=0;
}
else
{
ustanovka4=0;
flag4=1;
}
if(analog4<(predustanovka-5)&&sek4>=3)
{
flag4=1;
if(sek4<30)
{
digitalWrite(11,HIGH);
digitalWrite(10,LOW);
}
else
{
avaria4=1;
digitalWrite(11,HIGH);
digitalWrite(10,HIGH);
}
}
if(ustanovka==1&&ustanovka2==1&&ustanovka3==1&&ustanovka4==1)
{
lcd.setCursor(3,1);
lcd.print("ustanovlen");
}
else
{
if(avaria==1||avaria2==1||avaria3==1||avaria4==1)
{
delay(1000);
lcd.setCursor(5,0);
lcd.print("AVARIYA");
lcd.setCursor(3,1);
lcd.print(!avaria);
lcd.setCursor(6,1);
lcd.print(!avaria2);
lcd.setCursor(9,1);
lcd.print(!avaria3);
lcd.setCursor(12,1);
lcd.print(!avaria4);
}
else
{
lcd.setCursor(1,1);
lcd.print(analog);
lcd.setCursor(5,1);
lcd.print(analog2);
lcd.setCursor(9,1);
lcd.print(analog3);
lcd.setCursor(13,1);
lcd.print(analog4);
}
}
}
else
{
if(analogRead(0)>=1010)
{
obriv=0;
delay(1000);
}
else
{
obriv=1;
}
if(analogRead(1)>=1010)
{
obriv2=0;
delay(1000);
}
else
{
obriv2=1;
}
if(analogRead(2)>=1010)
{
obriv3=0;
delay(1000);
}
else
{
obriv3=1;
}
if(analogRead(3)>=1010)
{
obriv4=0;
delay(1000);
}
else
{
obriv4=1;
}
lcd.setCursor(2,0);
lcd.print("OBRIV DATCHIKA");
lcd.setCursor(3,1);
lcd.print(obriv);
lcd.setCursor(6,1);
lcd.print(obriv2);
lcd.setCursor(9,1);
lcd.print(obriv3);
lcd.setCursor(12,1);
lcd.print(obriv4);
digitalWrite(9,HIGH);
digitalWrite(10,HIGH);
digitalWrite(11,HIGH);
digitalWrite(8,HIGH);
digitalWrite(7,HIGH);
digitalWrite(6,HIGH);
digitalWrite(5,HIGH);
digitalWrite(4,HIGH);
}
}
}учитывая очень малое количество компонентов собрать можна на небольшой макетке.
-
А, жипы, чё по барабану? Им контроллер , в первую очередь нужен!
тогда вопрос вам, джиповодам- вам интересен вариант управления пневмой как радиоприемником???
вам как никому нужны больше уровней.
и здесь уже каждый на свое усмотрение распоряжается ими, кому кнопки дополнительные, а кому на паркинг и ц.з. цеплять...
-
Судя по дублированию сообщений, у него хром, мне на домашнем компе, пришлось на оперу из-за этого перейти...
я тоже оперой пользуюсь, но дублирование имеет место...
-
вернемся к шапке темы, где написано-
Создаю отдельную тему про 2-ую версию контроллера. В том числе о модификациях первой версии.
Не скрою, что цель прощупывание интереса / нужности к тем или иным добавлениям / изменениям. И, как следствие, принятие решения о работе в этом направлении.а отсюда следует что берите вовнимание пожелания.
пока ничего космического и сверхестественного непотребовано...
был вопрос о количестве уровней- пожелания есть....
интересовало относительно проводов и разьемов- тоже отписались....
корпус- великолепно, сделайте еще в отличие от первого варианта с отсоединяемыми разьемами будет превосходно. вот покажите автосигу или магнитолу у которой монтажная коса проводов торчит изнутри.
установщику гораздо проще расположить коробку и отдельно упаковать жгуты, а потом только подсоеденить.
помоему нынче доступны самые разные вариации на тему разьемов и прочего.
-
я тебе за PALN отвечу,
нет именно этот контроллер не стоит,
Рустем ставит кпп-01, и создаст здесь тему,
со всем описанием работы и косяками если таковые будут,
и прежде чем писать новую программу, нужно,
1.испытания кпп-01
2.общее мнение клубчан по кпп-02
1. замечательно...
2. на дух станицах достаточно написано, но только это больше похоже не на выслушивание мнения а на отстаивание своей идеологии.
-
на ходу регулировка не нужна,
но пример ни кудышний, неаргументированный
что и пытаюсь донести....
поэтому нет необходимости одновременно и кнопки и крутилку вкорячивать.
просто должен быть вариант выбора- крутилка или кнопка при инсталяции.
-
PALN, вот ты пишешь-
в итоге обкатка как раз сводится к выбору 3 оптимальных установок настрое, которы НЕ ИМЕЮТ НИКАКОГО отношения к уровню
Уровень - он и есть - там обкатывается только алгоритм включения клапанов
Остальные настройки - это считай чуствтельность / жесткость / скорость отработки подвески
По иному уровеньуровнем, а настройки подгонка жесткости амортизатров и стабилизатора....ж если такаяч аналогия ту уместна
На выхлопе должно быть три настройки - НЕ ПУТАТЬ с уровнем. Выставил настройку - поведение авто - и ставь нужный уровни.а теперь обьясни как можна с помощью твоего контролера изменять еще и работу амортов и стабилизатора, при этом неменяя настроек клиренса???
при настройке мы подбираем наиболее оптимальные клиренсы для определенных условий, а следовательно для них этих определенных услвий и настраиваем чувствительности, задержки и прочее. но никак не влияем на работу амортов. мы неможем пока настроить кнопочками работу амиков а под определенные уровни следовательно все манипуляции только вокруг настроек уровня.
-
ЗАЧЕМ тебе НА ХОДУ ПЛАВНО изменять клиренс???????
Пока ты плавно его меняешь смотря на крутилку ты можешь въехать в переди идущую машину или улететь в кювет!!!!!

-
Твой контроллер обкатывается на авто или нет?
У меня создаётся впечатление, что обсуждается чисто теория, т.к. половина всех ваших функций абсолютно не нужна.
ИМХО. Без обид.
В Авто
Но еще раз - авто это ТОЛЬКО устанавливаемый как текущий уровень. Не более того
Отдельно уставливаются параметры задержек и чуствительности, которые ВСЕГДА применяются ко ВСЕМ установкам ПОКА их не поменяешь
в итоге обкатка как раз сводится к выбору 3 оптимальных установок настрое, которы НЕ ИМЕЮТ НИКАКОГО отношения к уровню
Уровень - он и есть - там обкатывается только алгоритм включения клапанов
Остальные настройки - это считай чуствтельность / жесткость / скорость отработки подвески
По иному уровеньуровнем, а настройки подгонка жесткости амортизатров и стабилизатора....ж если такаяч аналогия ту уместна
На выхлопе должно быть три настройки - НЕ ПУТАТЬ с уровнем. Выставил настройку - поведение авто - и ставь нужный уровни.
Я понимаю, что при разном клирансе должно быть и разное поведение подвески... Но цель не Феррари а коммерчекский транспорт. Посему если не нравится - перестрой подеску под все уровни сразу... это блок позволяет
поддерживаться должен именно тот уровень который предварительно выбран а не некий текущий. недолжно быть текущих уровней, только предустановленые.
-
Твой контроллер обкатывается на авто или нет?
У меня создаётся впечатление, что обсуждается чисто теория, т.к. половина всех ваших функций абсолютно не нужна.
ИМХО. Без обид.
В Авто
Но еще раз - авто это ТОЛЬКО устанавливаемый как текущий уровень. Не более того
Отдельно уставливаются параметры задержек и чуствительности, которые ВСЕГДА применяются ко ВСЕМ установкам ПОКА их не поменяешь
в итоге обкатка как раз сводится к выбору 3 оптимальных установок настрое, которы НЕ ИМЕЮТ НИКАКОГО отношения к уровню
Уровень - он и есть - там обкатывается только алгоритм включения клапанов
Остальные настройки - это считай чуствтельность / жесткость / скорость отработки подвески
По иному уровеньуровнем, а настройки подгонка жесткости амортизатров и стабилизатора....ж если такаяч аналогия ту уместна
На выхлопе должно быть три настройки - НЕ ПУТАТЬ с уровнем. Выставил настройку - поведение авто - и ставь нужный уровни.
Я понимаю, что при разном клирансе должно быть и разное поведение подвески... Но цель не Феррари а коммерчекский транспорт. Посему если не нравится - перестрой подеску под все уровни сразу... это блок позволяет
я и пишу, что все что касается настройке, подстройке и перестройке должно, точнее обязано быть только в режиме настройки. и неважно, настраивается уровень или реакция, задержки или прочее. это недолжно быть доступно постоянно. и только при настройке системы.
в движении только переход между установлеными уровнями, где уже настроены и реакция и задержки.
а разве важно какой транспорт, ферари или комерческий??? безопасность в обоих случаях должна выполняться и надо об этом помнить.
и вы как разработчик должны максимально это учитывать.
опять-же, как в первой так и втопрой вариации контрлера нет контроля скорости авто и ограничения высоты от скорости.
и опять-же, мы управляем клиренсом и только клиренсом, остальные параметры подвески как работа стабилизаторов и амортов нами неконтролируется, а отсюда и особые требования к безопасности...
безопасность в первую очередь должна быть предусмотрена вами.
водилке за рулем есть и без этого чем заняться...
вы всех использующих ваш контролер должны воспринимать за блондинок, тоисть свести к минимуму управление в режиме автоматического поддержания уровня.
в режиме настроек пожалста гуляй душа....
Твой контроллер обкатывается на авто или нет?
У меня создаётся впечатление, что обсуждается чисто теория, т.к. половина всех ваших функций абсолютно не нужна.
ИМХО. Без обид.
В Авто
Но еще раз - авто это ТОЛЬКО устанавливаемый как текущий уровень. Не более того
Отдельно уставливаются параметры задержек и чуствительности, которые ВСЕГДА применяются ко ВСЕМ установкам ПОКА их не поменяешь
в итоге обкатка как раз сводится к выбору 3 оптимальных установок настрое, которы НЕ ИМЕЮТ НИКАКОГО отношения к уровню
Уровень - он и есть - там обкатывается только алгоритм включения клапанов
Остальные настройки - это считай чуствтельность / жесткость / скорость отработки подвески
По иному уровеньуровнем, а настройки подгонка жесткости амортизатров и стабилизатора....ж если такаяч аналогия ту уместна
На выхлопе должно быть три настройки - НЕ ПУТАТЬ с уровнем. Выставил настройку - поведение авто - и ставь нужный уровни.
Я понимаю, что при разном клирансе должно быть и разное поведение подвески... Но цель не Феррари а коммерчекский транспорт. Посему если не нравится - перестрой подеску под все уровни сразу... это блок позволяет





Контроллер КПП-02
в Контроллеры,клапана, автоматика и управление
Опубликовано
ну бортовая сеть никак не 5 вольтовая, и вероятность замыкания на 12 вольт есть всегда.
да и автомобиль это шкаф стоящий в углу, а совокупность разных механизмов и прочего, впюс воздействие среды эксплуатации и обслуживания...
подумайте над решением как этот просчет устрвнить в новой версии девайса...