Лидеры




Популярный контент
Показан контент с высокой репутацией за 11/24/12 в Сообщения
-
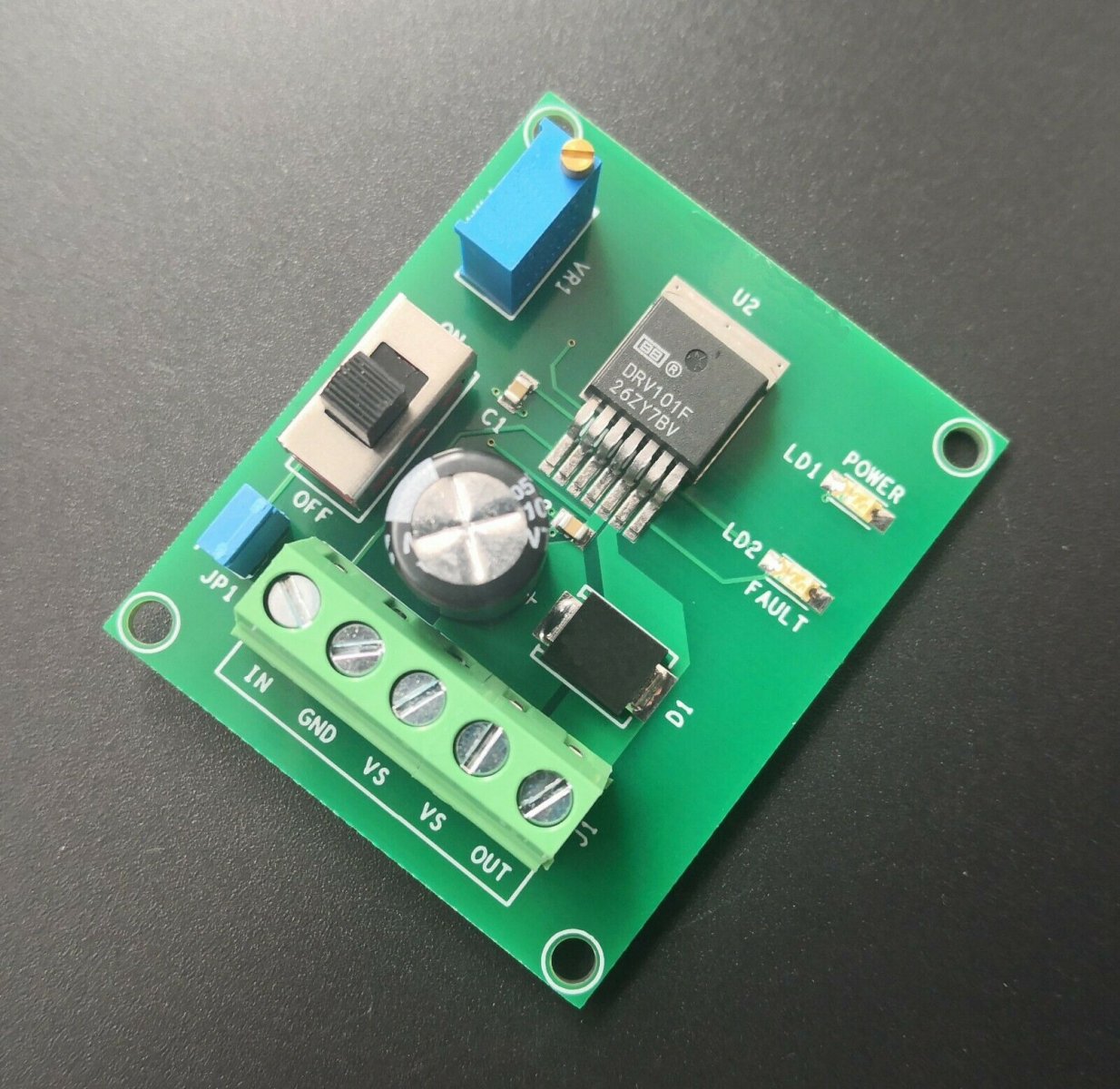
Изготовлены пневмостойки для спортивного прототипа на базе Сузуки Джимни. Амортизаторы однотрубные, диаметр поршня 50 мм. регулировка отбоя, пневмоподушки рукавного типа, диаметр 80-90 мм. Стойки изготовлены в мастерской Вербицкий Андрей @werbitsky_andrei

.thumb.jpg.301995213ac809d9a66a23d017e391c3.jpg)




 3 балла
3 балла -
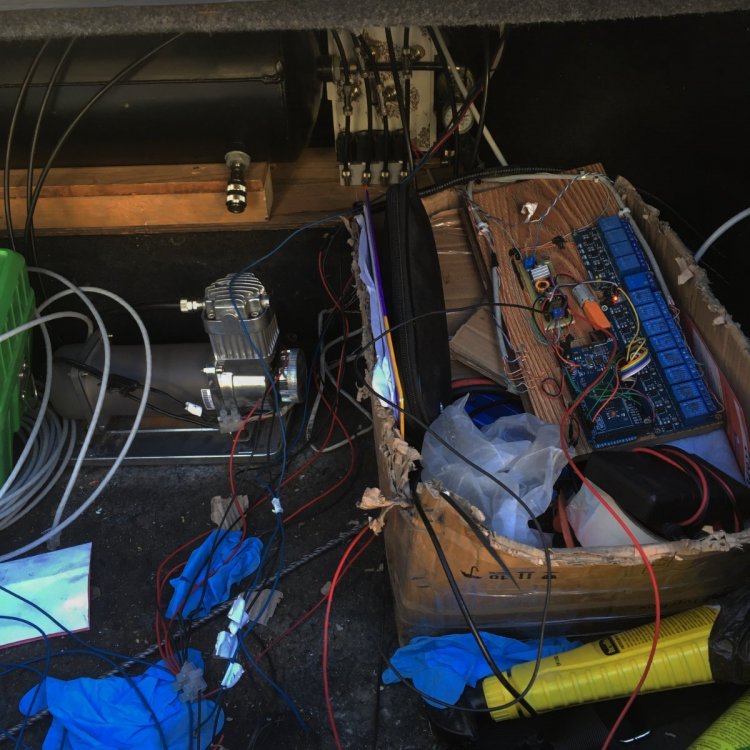
На скорости машина вообще не должна корректироватся,только на стоянке при погрузке (пассажиров,водителя,груза) потому что в поворотах при кренах идет большой расход воздуха,ни один компрессор не протянет долго.На заведенной стоячей машине контроллер выравнивал машину даже при порывах ветра.Я убил уже кучу компрессоров и выкинул нафиг этот контроллер, регулирую вручную поставил 4 вольтметра и по этим попугаям выравниваю.3 балла
-
Всё установлено, поездил, по первым впечатлениям стало мягче, но не сильно, вау-эффекта не получил. Может потому что изначально подвеска в плане комфорта была неплохая, хотелось сделать ещё лучше, получилось, но совсем немного. В планах поставить масляные амортизаторы сзади, сейчас там газомаслянные. На прошлой машине (Санта Фе), ставил маслянные, эффект был более заметен, чем сейчас после установки пневмы. Если результат будет, буду думать как внедрить масло спереди. Небольшое дополнение по задней подвеске и управлению. Трубка 6/4, у меня была 10/8, не знал куда ее деть - использовал ее как защитную оболочку для 6/4. Дополнительные ресиверы объемом по 5 литров, к подушкам соединил металлопластиковой трубой с внутренним диаметром ~20 мм и фитингом 1/2", длина соединений 40-50 см. Для левой стороны ресивер разместил за колесом в задней части машины рядом с запаской. С правой стороны так не сделать, поставил ресивер по центру над карданом. Сами подушки и крепление покупал как готовый набор в ARIDE, но подушки при заказе взял меньшего диаметра, они имеют такой же рабочих ход, но ниже на 3 см, поэтому подложил под них 3 см шайбу (видно на фото). Соединения делал на "американках", в случае необходимости смогу легко вернуть пружины. Задняя подвеска с левой стороны: С правой стороны: Управление работает без основного ресивера, при нажатии вверх включается компрессор и открывается соответсвующий клапан, желтые кнопки используются для выравнивания давления отдельно в передних и задних подушках. Есть датчик давления, показывает давление в вольтах. Выглядит так: Рабочее давление спереди и сзади примерно по 6,5 атм.






 3 балла
3 балла -
Думаю и до осени протянут)),чаще посматривать,если без изменений,то можно и оставить2 балла
-
Мой опыт реализации такого проекта https://fanclub-vw-bus.ru/forum/viewtopic.php?f=61&t=270542 балла
-
Вопрос в надежности. Что надежнее 4 диода или ШИМ-генератор и постоянно включенная катушка на клапане сброса? По моему выбор очевиден). Не понял, зачем "гонять компрессор при открытом клапане продувки хоть несколько минут". А доп ресивер - это дополнительный элемент (не нужный по факту), а чем больше в любой системе элементов, тем больше вероятность неисправности системы. Если выход с входом сложно перепутать, то клапана не подходят для данной пневмосхемы, потому что клапан должен держать давление из пневмоподушки. У вас же получается, что абсолютно герметичными должно быть;и ресивер и линия"ресивер-клапана" и блок клапанов и пневмоподушки, а при правильном расположении клапана абсолютно герметичны должны быть только блок клапанов и пневмоподушки. А если травит? И ехать надо с этой травкой. У вас же так было. Постоянно следить за тем сколько воздуха осталось в ресивере? А для корректировки клиренса нужно надуть травящий ресивер сначала? Так себе поездка(. Я это все пишу, потому, что считаю, что все колхозные пневмосхемы тем лучше, чем ближе они по конструктиву к пневмосхемам брендо-автомобилей, т.к. ихние инженеры совсем не дураки и свой хлеб ели не зря и если они в мир выпустили авто с таким конструктивом, то это самый надежный и эффективный вариант.2 балла
-
Неистово поддерживаю покупку штатного компрессора для пневмоподвески, а не для накачки колес. Единственное предложу вариант от мерседеса, т.к. он двухпоршневой и рабочее давление в системе мерседеса 20+ атм, так что осилит все хотелки.2 балла
-
Ооо - моя любимая тема про контроллеры ? У меня в семье эксплуатируется штатная пневма на А6С5 - нареканий по управлению нет, без проблем корректирует и поддерживает дорожный просвет на ходу, управляет рессивером, компрессором (в том числе в зависимости от температуры головки) и клапанами - больше от управления в целом особо ничего не надо. Главное требование - возможность эксплуатации без вмешательства в управление системой (выбирать там уровень постоянно и т.д. должно быть так, что положение выбрано когда-то и оно поддерживается всегда без вмешательства человека, т.е. условно как эксплуатация на пружинах - система не должна требовать внимания). Также важный плюс штатной системы - возможность диагностирования в т.ч. самодиагностика системы (с защитой её компонентов путем включения аварийного режима) Также в близкой эксплуатации находился блок MFTech, который по своему функционалу и опыту эксплуатации очень схож со штатным блоком, но есть какие-то моменты по конструкции платы (второй раз выгорела одна и таже микруха, управляющая реле компрессора, не исключаю, что может быть косяк со стороны машины, но его найти так и не удалось). Единственное что мне не нравилось - выбор крайних положений после калибровки датчиков ( грубо говоря контроллер запомнил крайние положения, а потом от них отступил по 10% и получились крайние положения, доступные к регулировке в автоматическом режиме, что не очень подходит для посадочников, но логика разработчика мне была понятна, тем более разработчик и последующий правоприемник были на связи, что и было одним из критериев выбора блока) В связи с кончиной очередного блока от MFTech был приобретен блок Sula (от ace of ace), на мой взгляд переоцененная игрушка, у которой из ценного только пульт управления и наличие wi-fi. В последствии выяснилось, что автоматического поддержания положения нету - только в планах, поддержки штатных блоков клапанов и систем с продувкой осушителя нет и скорее всего не планируется, в связи с чем пришлось городить переходник на базе реле и диодов, чтобы 8 канальное управление преобразовать в 6-ти. Также управление ресивером никак не завязано на управление стойками, контроля температуры компрессора в отличие от MFTech и штатных систем нет. Посмотрим как будет в эксплуатации. Также купил для опытов штатный блок управления подвеской от старого range rover (который мостовой классик и p46), в нем в принципе есть все что нужно, 6-ти клапанная схема, аналоговые датчики положения кузова, дискретные (вкл-выкл) датчики давления в ресивере и перегрева компрессора, возможность диагностики и калибровки датчиков ( в т.ч. установка нужных положений, а не предустановленных как в более современных системах, где инженеры сами придумали высоту разных положений кузова и поменять её без костылей нельзя) при помощи диагностических сканеров. Возможность учета при управлении состояния двигателя (заведен или нет), напряжения в системе, скорости движения, поддержания уровня кузова в стояночном положении. А самое главное - кондовая электроника, что в совокупности с тиражом этих машин вселяет надежду на надежность. Но пока возможности потестить на машине не было. Исходя из вышеизложенного требования к контроллеру такие: Управление штатными блоками клапанов (6-ти клапанные схемы), а не только 8кл, что дает универсальность блоку; Возможность управления клапанами в ШИМ-режиме, чтобы регулировать скорость изменения дорожного просвета (например снижать её по мере достижения нужного положения), но тут я соглашусь с мнением создателя MFTech (которое читал где-то на просторах интернетов, на драйве кажется), что скорость изменения дорожного просвета должна регулироваться пропускным сечением магистралей (ну или в каком-то таком формате, могу ошибаться, но кажется я такое у Олега читал); Управление продувкой осушителя (в т.ч. установленном на компрессоре); Контроль состояния и защита компонентов системы (обмоток клапанов и реле, температуры компрессора, состояния датчиков и т.д.), в т.ч. контроль напряжения бортовой сети, для исключения запуска компрессора при недостаточном заряде аккумулятора, наличие систем контроля открытых дверей и состояния тормозной системы можно конечно допустить, но не считаю их прям жизненно необходимыми, т.к. ничего фатального в случае регулирования дорожного просвета например в процессе торможения или при открытых дверях не случится, на мой взгляд в штатных системах это сделано просто для экономии ресурса компрессора (чтобы уменьшить по возможности количество попыток регулирования); Контроль давления не только в ресивере, но и в пневмобалонах, что легко осуществимо при использовании штатных блоков клапанов с датчиком давления в главной магистрали; Что может способствовать защите компонентов (например не допускать снижения/повышения давления в балоне и т.д., это конечно овсе можно сделать и механическим путем, но в части элемента управления - почему бы и нет) ли например управлению по давлению ( не очень разделяю такую стратегию, но вполне допускаю её существование) или отчасти диагностированию датчиков положения кузова (понятное дело, что от загрузки давление при той же высоте меняется и т.д., но подумать в этом направлении можно, т.е. при сборке системы запомнил какие-то контрольные точки положение/давления и можно уже прикидывать нагрузку (актуально наверное для грузовых/коммерческих автомобилей) или например состояние подушки (допустим растянулась или грязь набилась = давление при той же высоте и нагрузке упало, но это так больше мысли в слух). Наличие системы диагностики и калибровки (в идеале на внешнем устройстве т.к. тыкаться двумя кнопками на маленьком экране как это сделано в актуальной версии MFTech не очень удобно, а какой-либо системы диагностики там ); Контроль дорожного просвета в автоматическом режиме в т.ч. и при движении автомобиля (ниже свои мысли по этому поводу еще скажу); Простота управления ( грубо говоря 2-3 кнопки) и наличие индикации положения (количество положений и т.д. - это уже вторично). Использование по возможности инженерных решений (всякие схемы и т.д.), применяемых в автомобильной промышленности (для обеспечения надежности, т.к. решения проверены временем), в т.ч. автомобильных разъемов, для обеспечения надежного контакта электрических соединений под действием вибраций, возникающих в процессе эксплуатации автомобиля. Самое сложное и интересное в контроллере - алгоритмы контроля и поддержания высоты в движении, тут позволю себе немного не согласиться с вышеприведенным высказыванием, что положение колеса рандомно, в любом случае колесо совершает колебательные движения относительно точки равновесия (читай установленного дорожного просвета). Понятное дело, что сырые данные с датчиков использовать нельзя (помимо самих колебаний системы, там же в сигнале один фиг шум будет присутствовать) и главное в контроле - отфильтровать всплески, тут уже в дело вступает математика (всякие скользящие средние значения, математические ожидания, дисперсии и т.д.), а потом уже грубо говоря настройки чувствительности системы (насколько можно отклоняться от заданного значения, пусть даже как долго отклонение от заданного значения происходит и т.д.). В части нужности контроля дорожного просвета в движении приведу пример из личного опыта : Начала спускать подушка (почему так получилось - другой вопрос), не очень сильно (примерно из верхнего положения в нижнее за минуту и пару минут), автомобиль пузотерка, где движение в самом нижнем положении невозможно (максимум на прямых колесах заехать на эвакуатор, протерев при этом подкрылки, опять же опустим зачем такие машины и т.д.), понятное дело, что зачем ехать на такой машине - зови эвакуатор и езжай чинить подушку, но когда это дело происходит ночью в метель и эвакуатор не приедет, то надо ехать чего бы это ни стоило. В итоге машина на ходу поднималась из рессивера, когда давление в ресивере опускалось - компрессор его накачивал, в это же время регулирование продолжалось и в таком режиме автомобиль без проблем доехал 300 км до дома. Еще другая особенность современных машин (audi a4b9) выяснилась, что при разности дорожного просвета по сторонам ( уходит схождение колеса) система динамического рулевого и система стабилизации сваливается в аварию (ошибка по калибровке датчика положения руля), которая убирается только ODIS'ом, так что и тут автоматическая регулировка нужна оказывается (понятное дело что надо делать системы которые не спускают и т.д., но такие системы тоже должны быть регулируемыми). Практически все вышеописанное в контроллере MFTech есть ( в том числе реально адекватное поддержание уровня кузова, на уровне штатной системы), единственное что мне не хватило - надежности платы (не исключаю что конкретно мне повезло или в энергосистеме автомобиля есть что-то что не было учтено, т.к. я не думаю что количество установленных контроллеров мало и тесты всякие разные проводились по любому), какой-то мало мальски развитой системы самодиагностики (понятное дело, что тот кто устанавливает системы и сам все проверит и выйдет из ситуации когда что-то надо продиагностировать), контроля давления в подушках путем использования датчика давления в блоке клапанов (что он просто так пропадать будет). Повторюсь - нештатных контроллеров, которые могут (даже уже не говоря об адекватном управлении) в штатные пневматические системы считай нет в продаже, но не факт что это особенно кому-то нужно, на виду в основном всякие пузотерские прожекты, собранные на 8кл схеме с осушителями для краскопультов и т.д. Поэтому в случае если есть желание запускать какое-то производство - крайне рекомендую прозондировать рынок, поизучать конкурентов (в т.ч. mftech, ace of ace, HPC suspension, всякие airlift и т.д.) Забыл кстати упомянуть про проект ASCU (https://vk.com/springsandwheels) лично не пользовался, но по факту простой и дешевый контроллер на ардуине, который я думаю справится с базовой задачей установки нужного уровня (без автоматического поддержания в движении) Вот такое мое скромное мнение по системе управления пневмоподвеской (что-то мог забыть, в чем-то могу конечно ошибаться), надеюсь будет полезно ибо начинание в любом случае интересное.2 балла
-
Ну если просто поиском по форуму поискать, можно кучу тем найти посвященных в той или иной мере расчету грузоподъемности подушек, базово: давление = нагрузка / площадь поршня ( диаметр которого определяется по середине переката) Тут на форуме очень много информации по этому поводу. Но грузоподъемность это скажем так статическая величина, тут надо прикидывать жесткость подушки Вот эту тему особенно рекомендую: https://pnevmopodveska-club.ru/topic/1881-kak-rasschitat-pnevmu-obsuzhdenie/#comment-471812 балла
-
Ну так переходник с 45 на 60 по моему не большая проблема:), по крайней мере меньшая, нежели неподходящая форма поршня. Хотя если без претензий на какие-либо ездовые качества, то тогда без разницы. 45мм помоему обычные сканиевские подушки (cb0030, cb0074, cb0067). По поводу длины, я всегда прикидываю, что длина рабочей части поршня ( по которой катается рукав) это +- половина от хода подушки, в данном случае ход амортизатора 150мм (наличие отбойника не считаем ибо меньше не больше в данном случае), следовательно нужен поршень длиной 80мм, желательно чуть больше, тут наоборот - больше не меньше:) В части длины подушки, длина рукава она постоянна ( ну по крайней мере я так считаю и использую для прикидок), соответственно при накачивании уменьшается его длина, так обычная сканиевская подушка надувается примерно в 120мм при свободном диаметре 80, следовательно длина подушки в накачаном состоянии будет на 25% меньше, чем в ненакачанном ( пропорционально увеличению диаметра), отсюда надо рассчитывать, чтобы расстояние от верхней опоры до нижней было равно или меньше длины подушки в свободном состоянии - 25-30% (и отсюда отнять еще мм 10, чтобы рука прикрывал кольцо). Про грузоподъемность я думаю на форуме уже почитали, но так в кратце, для сканиевской подушки которая дуется до 120мм, при поршне 80мм и давлении условные 8атм грузоподъемность будет примерно 700кг, что достаточно для заданных условий. Еще необходимо прикинуть хватит места то под подушку заданного диаметра, базово сравнить хотя бы с диаметром штатной пружины. Если честно если есть какие-то претензии на ездовые характеристики, то проще поршень сделать под необходимый рукав, да обжать/сделать разборный поршень. Ибо потом всеравн ок этому приходишь.2 балла
-
Контроллер прошел через 3 стадии, в каждой истории свои плюсы и минусы. История 1: Изначально это 4х контурная система. Управление происходило путем считывания 4х датчиков давления и еще 1 датчика давления на рессивере. Контроллер считывал показания давления и качал передние стойки, потом одну стойку оставлял в покое, а вторую докачивал. После качал задние по тому же принципу. Сравнять давление клапанами на 8 трубке довольно сложно даже микроконтроллеру. Даже при кратковременном открывании клапана, давление резко выплевывалось в датчик и на этот момент открытия, напряжение (показание) скачет, контроллер понимает, что качать хватит и по закрытию клапана давление получается ниже, чем планировалось установить. Если провести больше итераций на установку определенного давления, в теории можно свести давление по оси в одинаковое значение. А так же программно определив сглаживающий фильтр, можно убрать ступеньку от резкой смены давления. Опять же фильтр должен быть адаптивен к разнице давления рессивера и стойки, адаптивен к разнице фактического давления и устанавливаемого. Напомню, здесь проблема в датчиках давления, которые при открытии клапанов кратковременно дают ложные значения. Тут появляется вторая проблема. Если давление на задней и на передней оси разное. Тогда сравняв давление на переде, при том что давление сзади между стойками разнится, Мы выставляем равное давление сзади, но с этим теряем равенство спереди. Т.к. при разном давлении сзади передняя часть по разному нагружается. Прочтите внимательно :). Такой замкнутый круг приводит к тому, что машина имеет по диагонали низкое или высокое давление, что тянет ее влево при газе и вправо на тормозе. Так я проездил долго, в принципе подвеска прощала и позволяла через раз выставлять машину ровно чтобы ее не тянуло в стороны. Примерно это выглядело так, в процессе бесконечных решений проблем по аппаротной части. История 2: Переход на датчики высоты. Датчики высоты на первый взгляд решают проблему быстрого набора высоты. Им без разницы под каким напором дунет в них воздух. На кузове моей машины есть 2 штатных датчика, которые управляют автокорректором света, расположены на левой части авто спереди и сзади. На старшем брате этого кузова штатная пневмоподвеска предполагает 4 датчика высоты, ровно такие же, на таких же местах крепления. Я решил немного сэкономить и заказал 2 пары левых датчиков с родного кузова. Перекрутив стойки на датчиках, инвертировал показания. Попытался написать код, который будет рулить клапанами примерно как в истории 1 и уперся опять же в проблему диагоналей. Можно сделать итераций 3-5 и добиться одинаковой высоты на всех колесах, но это время, дерганье машины. Это не стабильно, нет уверенности и чувства, что все работает по штату, хотя этот способ более прост в исполнении и чуть надежнее первого. История 3: Гениальное - просто. Чем проще система, тем она стабильнее. Меньше датчиков, электроники - более предсказуемый результат, меньше ошибок программных, аппаратных. Я поставил обратно штатные стойки. Я оставил штатные левые датчики высоты, как и говорил, один спереди, другой сзади. Добавил между стойками на одной оси перепускной клапан. Работает теперь так: передние стойки одновременно набирают нужную высоту, получая показания высоты только с левого колеса. После набора, открывается перепускной клапан между стойками, который естественным путем выравнивает давление между стойками на одной оси. Тоже самое со стойками сзади. После того, как машина набрала высоту перепускные закрываются и машина имеет точное значение на датчике спереди и при этом равное давление на оси, так же и сзади. Если взять пример, что машина стоит с абсолютно неравным давлением на всех стойках. После первой итерации набора высоты, после выравнивания давления может оказаться, что высота стала чуть ниже, чем задавалась. Но это проблема первой итерации изначально когда машина была с разным давлением на оси. На второй итерации давление на оси будет равное и высота будет ровно той, что мы задаем. Итак, вторая итерация нужна лишь для систем, имеющих утечки воздуха. В остальном, нужна лишь постановка высоты на ровной площадке. Данный набор клапанов исключает перекачивания давления между осями, как в двухконтурной системе, при этом скорость набора высоты остается на уровне 4х контуров. Далее опишу, что контроллер умеет еще, кроме как ровно выставлять любую высоту. При наборе высоты контроллер учитывает показания датчика давления в рессивере, что подсказывает ему, когда нужно включить компрессор и когда выключить. Так же на компрессоре стоит датчик температуры, который дает понять, что лучше докачать позже, когда компрессор остынет. Естественно, контроллер не дает качать при высоких температурах компрессора или, если в рессивере слишком много воздуха. Так сказать, что быстрее наступит. На пневмостойках от старшего брата кузова машины есть регулировки жесткости стоек. Крутится шток, который меняет сечение внутри стойки. Доступно 12 положений на штатном шаговом моторчике. Пока что это ручное управление от мягкого, до зубодробительного. Развитие в этом направлении это либо управление штоком от скорости авто, которое можно брать с датчика абс, либо заменить жопомер жесткости на датчик, считающим редко или часто машина трясется на неровной дороге. Тут в видео, к сожалению, не конечный описанный результат, проявленный в виде кривых надписей и прочих мелких недочетах. Но говорить и строить теории можно долго, а результат я демонстрирую. Сам контроллер в этой стадии живет около года, на нем проехал маршрут с Иркутска до Ростова-на-Дону (~6к км), пережил Иркутские -30 морозы. Переделка пепельницы в блок управления - отдельная тема с подгоном рамки, 3д печатью, упаковывания дисплея и кнопок.

 2 балла
2 балла -
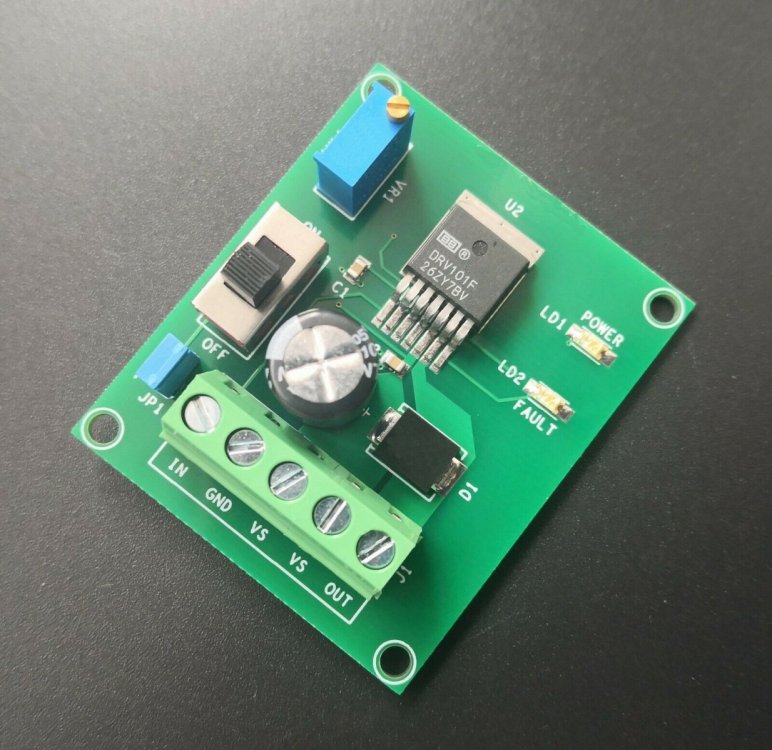
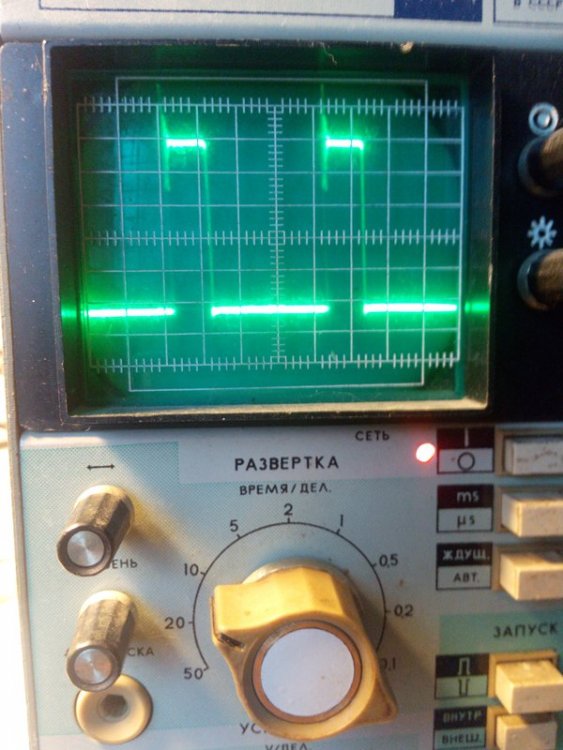
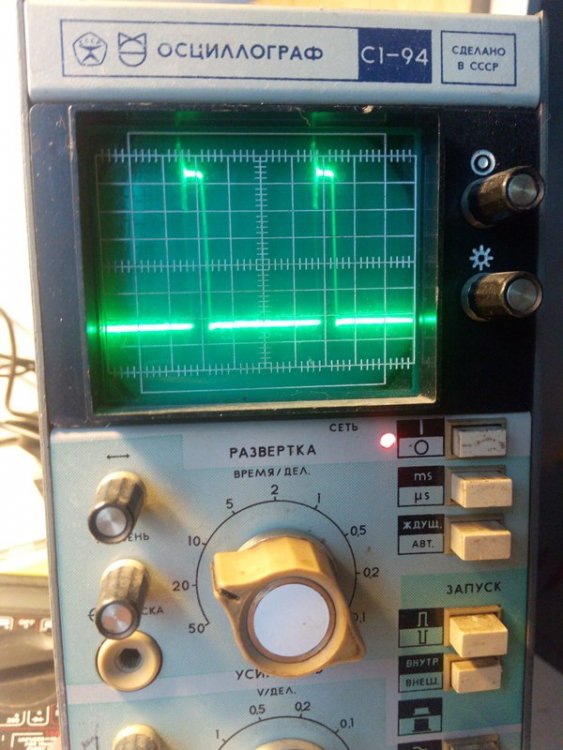
Собственно это наверное будет интересно прежде всего строителям пневмо подвесок, потому что все не штатные, колхозные решения наряду с огромными плюсами обладают и рядом минусов.Основной минус заключается в том, что при использовании пневмо баллонов с амортизаторами штатной жёсткости исключается возможность использования пневмы в крайних положениях. Т.е подняться до самого верха и переползти через что то, конечно же можно, как и понтово опуститься на WV Fest))))Но вот в реальной езде пробои и отбои раздолбают всю подвеску. Дело в том, что спуская давление из баллонов и опускаясь в "спортивное" положение, подушки становятся жёсткими на резких неровностях (вроде как и надо), но при этом на плавных препятствиях сопротивление воздуха никакое и на лежачем полицейском получим громадный пробой. Аналогично и сверху. Значит нужно регулировать жёсткость самих амортизаторов.Собственно система DCC и придумана для этого. Регулируемые амортизаторы выпускает фирма MONROE.Каждый аморт имеет внешний клапан, который при приложении к нему тока регулирует внутреннее перепускное отверстие по маслу. Информацию по параметрам сигналов управления добыть не удалось, естественно. Секрет))))Делюсь секретом.Покупаем на Ебэе или где то ещё регулируемый ШИМ драйвер с частотой 20-25 кГц и регулируемой скважностью от 10% до 50%. Драйвер должен выдавать в максимуме ток порядка 3А.Мой драйвер имеет 2 типа регулировки скважности — потенциометром и приложением напряжения на отдельный вход от 0,7 до 3,8В. Для системы какой либо автоматики нужно задействовать вход внешнего напряжения.Стоимость драйвера 900 руб. Можно спаять и самому. Далее на что хватает фантазии. Например при скважности 50% амортизатор вообще как палка, рукой очень трудно прожать и ещё сложнее выдвинуть. Скважность 25% даёт жёсткость чуть выше штатной И вот такая скважность распускает аморт так, что почти не прилагая усилия можно делать со штоком что угодно Без приложения к клапану тока, амортизатор работает приблизительно как штатный. Т.е можно купить 4 платы ШИМ драйвера, вывести в салон 3-5 кнопок, простейшую резистивную систему и получим аналог старой системы управления жёсткостью (на Пассатах такая стояла, без автоматики КАН шины) Я хочу попробовать сделать на контроллере и тач экране для понта)) Едиственный минус это стоимость регулируемых амортизаторов — под 50 тысяч((( Естественно, всё это можно сделать и для пружин.

 2 балла
2 балла -
Сливы типа F9000, только с перетачиванием поршня в сторону увеличения. Штатно не хватит грузоподъёмности. У меня Тигуан и масса-развесовка примерно одинаковая с твоей машиной.2 балла
-
Дроссель ставить нужно на выходах клапанов. Сразу на выходах. У себя я решал проблему очень быстрого подъёма и, соответственно, пролёта точки уровня установкой дросселей рядом с подушками. Закрутил дросселя почти на максимум. Скорость работы стала нормальной, но обнаружился один неприятный момент - клапан закрылся, а подъём продолжается. Давление, которое нагоняется в трубку линии стравливается в подушку уже после закрытия клапанов. Сейчас дроссели у меня закручены посередине, потому как места для них у блока клапанов нет(((. В общем в тему или нет, но моё мнение такое - проходной диаметр каждого элемента линии от фитинга клапана до фитинга в подушке должен быть одинаковым и не тонким. А вот скорость работы пневмы, если надо, регулировать дросселем сразу за клапанами.2 балла
-
Я тут почитал.... а с чего все решили, что у всех автомобильных пружин линейные характеристики??? и еще - у всех подушек есть график рабочего хода, который отражает ее характеристики.... самое банальное - это не заниматься засорением мозгов формулами - а взять пружину автомобиля - замерить рабочий ход - получить график - и подобрать пневмоподушку с близкими рабочими характеристиками - вот и ВСЁ!!!!2 балла
-
На форум приходит много новичков, слышавших о пневмоподвеске, и только начинающих изучение этого вопроса! Многие уже определились, с желанием поставить "ПНЕВМУ", но не знают с чего начать! Почти все, создав свою тему, задают одни и те же вопросы! Опытные Пневмоподвеско-строители, относятся с пониманием (сами когда то такими были), и отвечают на них! Многие ответы покажутся очевидными, но как говорится "C`est La Vie" Вопросы-ответы: Хочу пневму с чего начать? Для начала можно прочитать раздел форума "F.A.Q. и статьи" особенно Основы теории подрессоривания, пневматической подвески. и книга по пневме.zip Какие подушки мне нужны? Чтобы получить ответ на этот вопрос вам нужно ответить попунктно на ВСЕ ВОПРОСЫ: 1) какой вес авто, и развесовка? 2) тип подвески перед-зад? 3) Диаметры пружин перед-зад? 4) Минимальное расстояние от пружин к любым объектам находящихся вокруг пружины (кузов, колесо, рычаги, стабилизатор ПУ, тормозные трубки....)? 5) высота пружины в стандартном положении (под нагрузкой), и высота с вывешенным колесом, ну и если кто то умудрится, то и в сжатом (паспортная-полная длинна пружины не интересует)? 6) Если тип подвески не "макферсон", то не помешало бы за одно с длинами пружин, замерить изменение расстояния от колеса до арки? 7) Желательно фото стоек-пружин установленных на автомобиле? 8) Диаметр стойки? 9) Если пружина смещена относительно штока,- замерить расстояние от штока до кузова. (актуально для "макферсон") 10) расстояни от стойки до колеса, и от нижней тарелки пружины, до колеса (актуально для "макферсон") 11) Высота и диаметр горловины стойки (часть которая возвышается над тарелкой)(актуально для "макферсон") 12) Для чего вам пневма? Занижение (спорт,- нужно жестко), или комфорт в стоке и изменение клиренса вниз-вверх (по необходимости)?? (любой из проигнорированных вами пунктов, не даст полной картины, и подбор подушки перейдет в раздел "угадайка"!! Типы подвески могут быть разными даже у одной и той-же модели авто, и даже профи. не могут все их знать, а за вас эту информацию навряд ли кто-то будет искать) Обязательно ли сразу комплектовать датчиками высоты,пультом с кнопками, клапанами, манометрами? Не обязательно! Если подушки сделать (загерметизировать) правильно, то травить ничего не будет, можно поставить ниппель как на колесе, накачать и ездить! Единственное, помним что воздух при нагреве-остывании изменяется в объеме, и утром клиренс машины может быть ниже чем вы оставили её вечером! Как одеть подушку на стойку? Если подушка подобрана правильно, и диаметр совпадает с диаметром стойки, но одеть подушку на стойку мешает стальной наболдажник свеху стойки, не беда!!! Его просто нужно аккуратненько сбыть со стойки, сходит достаточно легко! Варианты герметизации пневмоподушки на стойке Макферсон Хочу пневму для занижения но хочу мудрить с герметизацией подушек на стойке, что подскажите? тема уже есть Кто то использовал AERO SPORT Обязательно ли срезать тарелку под пружину на стойке? Не обязательно, но есть шанс не попасть в высоту подушки и при наезде на кочку, прокусить подушку или сломать поршень; также дно тарелки может быть не ровным, и подушку будет кревить... Должна ли подушка вращаться вместе с штоком (передняя стойка макферсон)? В моей опоре шток не поворачивается. Как правило подушка герметизируется на штоке уплотнительными кольцами, и даже если шток свободно проворачивается в них, это не значит что можно оставить шток жестко зафиксированным как это было на родной опоре (большинство опор так устроены)! На самом деле работать так оно будет, но не долго, резина без смазки не сможет долго скользить по штоку! соответствующая тема Опорный подшипник передней стойки Нужен ли отбойник на стойках? Отбойник нужен по любому, даже если он мешает занижению, и давление в подушках настолько высоко что вы не боитесь пробоя! Мало того отбойник поможет вам без проблем доехать до пункта назначения, с полностью сдутой подушкой (даже просто так, для красоты на отбойниках покататься )! Проехавшись на сдутых подушках без отбойника, вы скорей всего "потеряете" амортизатор, и есть шанс прокусить подушку. Если планируем ездить на минимальном клиренсе, то отбойник лучше купить полиуретановый (не пено-полиуретан, не силикон), если он длинноват, его можно укоротить! В какой последовательности должны быть подключены элементы от компрессора до подушек, и что нужно? Порядок подключения и компоненты системы с ресивером : 1-Компрессор 2-армированный РВД или медная трубка 3-центробежный водоотделитель 4-клапан разгрузки или НО клапан (нормально открытый) 5-механический обратный клапан 6-ресивер 7-влагопоглатитель на основе силикагеля 8-обратный клапан 9-блок клапанов Порядок подключения и компоненты системы без ресивера : 1-Компрессор 2-армированный РВД или медная трубка 3-центробежный водоотделитель 4-клапан разгрузки или НО клапан (нормально открытый) 5-механический обратный клапан 6-влагопоглатитель на основе силикагеля 7-блок клапанов Что такое клапан разгрузки (он же элекрто клапан сброса давления ) и для чего он нужен? Клапан разгрузки представляет из себя обычный НЗ электроклапан который открывается электроникой, на несколько секунд, после окончания работы компрессора, или НО клапан - который закрывается исключительно при включении компрессора, в остальное время открыт. Клапан разгрузки предназначен для сброса воздуха в атмосферу из магистрали между водоотделителем и механическим обратным клапаном. Необходимость в его установки обусловлена несколькими факторами: - у многих водоотделителей сброс происходит по падению давления ниже некого порога, если давление не падает, то клапан сброса воды закрыт, вода накапливается, и в результате попадает в систему, а зимой может замерзнуть, со всеми вытекающими.....; -обратный клапан (обычный механический), в большинстве случаев, имея газовый подпор, не может полностью закрыться, и при наличии утечки через компрессор идет потеря воздуха, резкий сброс давления гарантирует закрытие обратного клапана; -так же компрессору гораздо проще стартовать, если он не имеет газового подпора! то есть на холостую, даже при слабом напряжении бортовой сети , компрессору гораздо проще "стартонуть"! Это значит, что пиковые нагрузки на электросеть автомобиля будут менее заметны, ресурс компрессора будет выше, а самое главное в водоотделителе не будет накапливаться, старый враг пневмы, а особенно клапанной системы,- ВОДА!! Вода после окончания работы компрессора, будет сбрасываться из магистрали в атмосферу.... Это не все вопросы-ответы, еще будут добавляться! Вопросы задавайте в созданных для этого темах: Пневмоподушки (вопросы и ответы) Шланги, фитинги, переходники, способы уплотнения, рвд, медные трубки и прочее Ресивер,влагоотделитель,манометр Компресcор и подготовка воздуха Удачи в начинаниях!!!2 балла
-
Программка колхозно деревенская, т.к. я не программист. Тем не менее почти полгода на ней катаюсь. Была идея построить систему на более морозоустойчивом контроллере, но меня ломает ассемблер изучать. Можно пинать, критика принимается. Описание скетча.doc2 балла


.jpg.71dbd464c3569ce73558a10b6a35668e.jpg)