

Maximus
-
Постов
980 -
Зарегистрирован
-
Победитель дней
52
Тип контента
Профили
Форумы
Календарь
Сообщения, опубликованные Maximus
-
-
-
Именно, они не смазываются, а значит стираются! Можно сделать с манжетой, но токарь нужен правильный! Я этот момент подшипниками обыграл!
-
@Orkan, Будет, но не долго

ну я же не зря обьем шланга от блока клапанов до обратного клапана обозвал ресивером.)))))там давление всегда будет больше чем в подушках.просто этот обьем ничтожно мал.но тут ведь не обьем важен,а давление.и еще.он не должен травить.конечно на пути у воздуха есть еще и клапан компрессора.но клапана у компрессора не факт что герметичные.
Обратный клапан у компа, даже у китайского нормально держит!
В магастрали от компрессора до подушек давление такое же как и в подушках, с чего оно будет больше? Разве что если качать не открывая клапана!
Опять же, чтобы продавить клапан нужна разница в давлениях от 1,5 Атм, а это возможно только при включении компрессора не открывая клапана, или когда перед и зад имеет значительную разницу по давлениям (допустим накачал зад до 2,5, а перёд нужно накачать до 6, вот зад сам и накачаетсядо 4,5 не открывая клапанов )!
У меня на Кимо такая ситуация, полностью сдутые подушки; качаю перед до 4атм, задние клапана закрыты, зад надувается до 2,5атм, меня лично это не напрягает, так как у меня, это и есть ездовое давление
А так установка еще одного клапана ГБО полностью решает эту проблему! -
@SERG, Будь другом, дай схемы или ссылки на схемы!
А где платы покупал, в частности "расширитель портов для дисплея"???
-
Да, для пробы намотать туда изоленты, изменяя глубину сужения (форму поршня) и покататься! Может увеличив диаметр на 5мм всё начнёт устраивать, а может до ровного захочется...... В общем упаковка изоленты и можно столько форм поршня опробовать!!!!

-
Сам понимаешь, тип подвески другой, у нас стойка поворотная (макферсон), и сечение у моего шланга 18мм, в арке физически не установить, даже если бы место было
-
-
Та у них какаето грамозкая конструкция получается, хочется чтото поминиатюрней, по аккуратней! А в прочем нужно определится с местом установки, а потом делать!
Есть идея по расположению передних доп. ресиверов!
А если взять 2-е трубы диаметром окло 30мм, скажем из алюминия сварить аргоном между собой таким же диаметром трубы, плавно обогнув стойку сзади, (там ничего не мешает)! Прикрепить к стойке приблизительно так,
 рисовать не умею, но приблизительно...
рисовать не умею, но приблизительно...и соединить с подушкой на прямую! По моим расчетам около литра в объеме добавится, + максимальная близость к подушке....
Какие мнения?
-
Лазил по авторынку, наткнулся на ДПДЗ, купил
Теперь думаю как из них датчики уровня заколхозить! Не у кого нет чертежей, или фоток самодельных датчиков? 

-
@AvengerSE, ты не путай бублики с грушами!
У бублика подъем на прямую зависит от давления, а у груши от начала подъема и до конца подъема давление может вообще не меняться (если поршень ровный)...
+ если в подвеске на бубликах давление достаточно велико (4-8атм), то от лишних 100кг клиренс практически не меняется (каких то 5мм), а на бубликах я так понимаю, такое изменение веса не проходит незамеченным!!!
Вот и получается что нам на бубликах, не понять с какими "ветряными мельницами" борятся "донкихоты" на грушах
-
это тормозной шланг на немцев, фолцы, ауди и тд...
-
-
Кросс-коды:
Бренд ................Кросс-код
RENAULT...... 5010130797
........................5010629414
MONROE.............. CB0075
CONTITECH.......... SZ50-9
WABCO.......... 4386041260
PETERS ...........084.257-71
CONNECT.......... C 321051
Blacktech................ 21001C
AIRTECH................. 121051
SABO ......................895266
-
AIRKRAFT:121051

Vehicle :RVI
Model :RENAULT
Oem :RVI: 5010 130 797 G
Cross :CONTI: SZ50-9,MONROE: CB0075
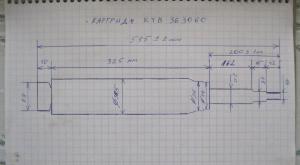
В руках держал аналоги, размеры снимал рулеткой (могут быть неточности)
фото




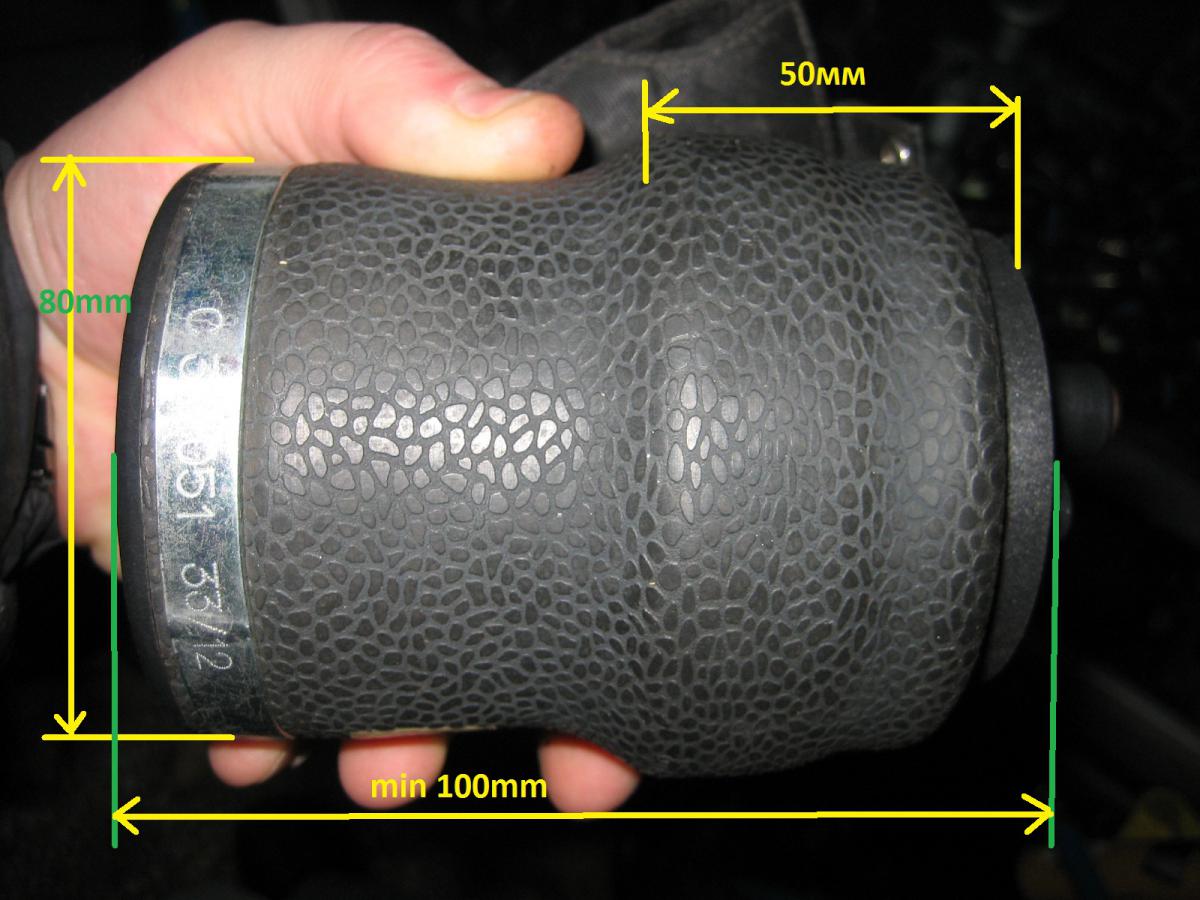
Внутри уже есть отбойник, именно он и не дает сжать подушку до 5см!Кросс-коды:Бренд Кросс-код RENAULT 5010130797 5010629414 MONROE CB0075 CONTITECH SZ50-9 WABCO 4386041260 PETERS 084.257-71 CONNECT C 321051 C321051 Blacktech 21001C AIRTECH 121051 SABO 895266 -
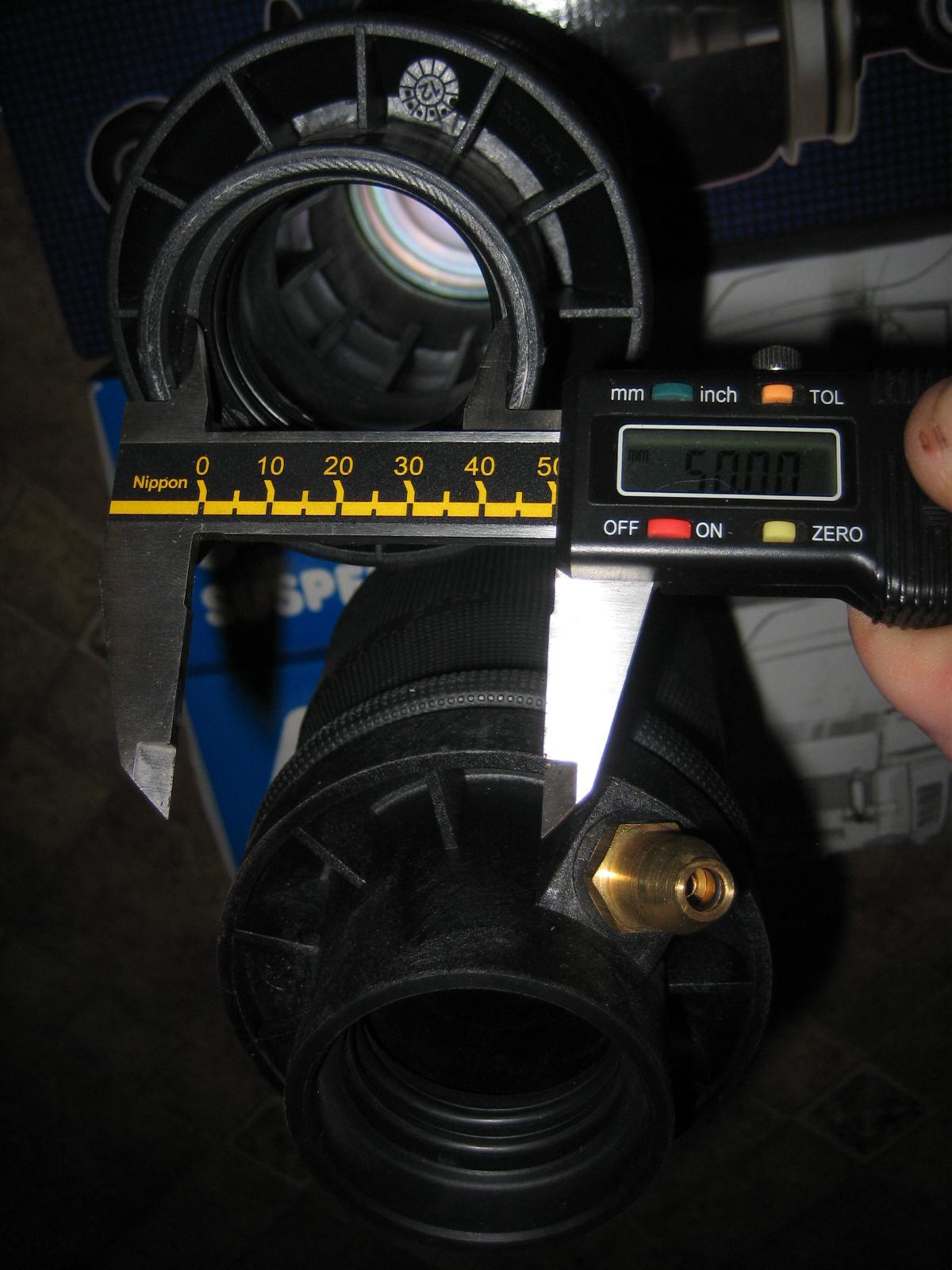
Пока не красивое и не крашенное, но это не заставит долго ждать! Главное затягивается руками и не пропускает.....
-
-
Именно по этому я и делал стойку так чтобы можно было по ней двигать низ подушки! В ходе испытаний, вычислил давление на котором максимально комфортно, и выставил подушку так чтобы стоковый клиренс соответствовал этому давлению!
-
Прикупил подушек! В планах по кругу использовать 121208, но не уверен что сзади влезут, по этому взял и покороче! Если примерка покажет что влазят 08,- то докуплю, а 02 притулю на другой авто!







-
@kimer2002, А можешь такую же сделать только без объема?
 Очень нравица! Хочу на багажник приклеить
Очень нравица! Хочу на багажник приклеить А как эмблема клуба не плохой вариант у @Леший, только нижнюю подпись поменять на "клуб любителей пневмоподвески"
-
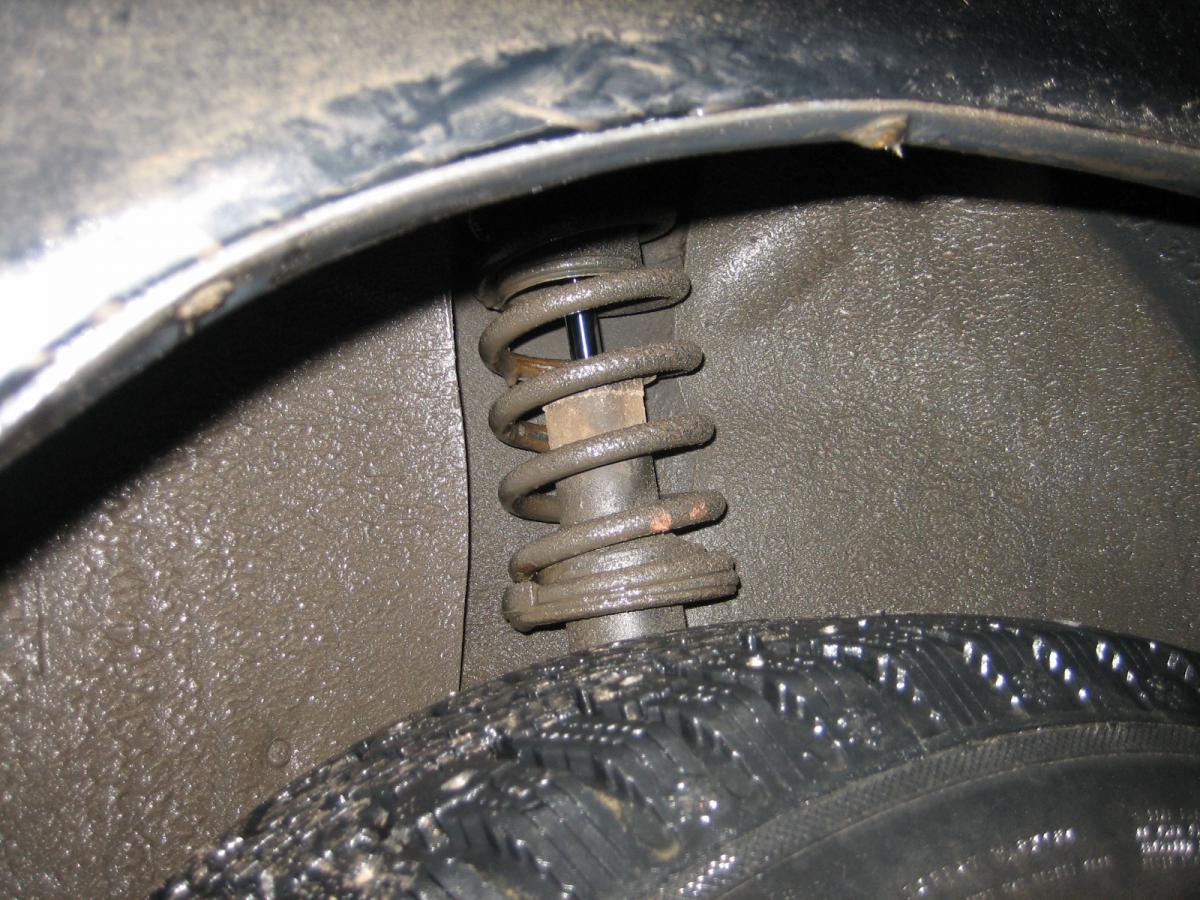
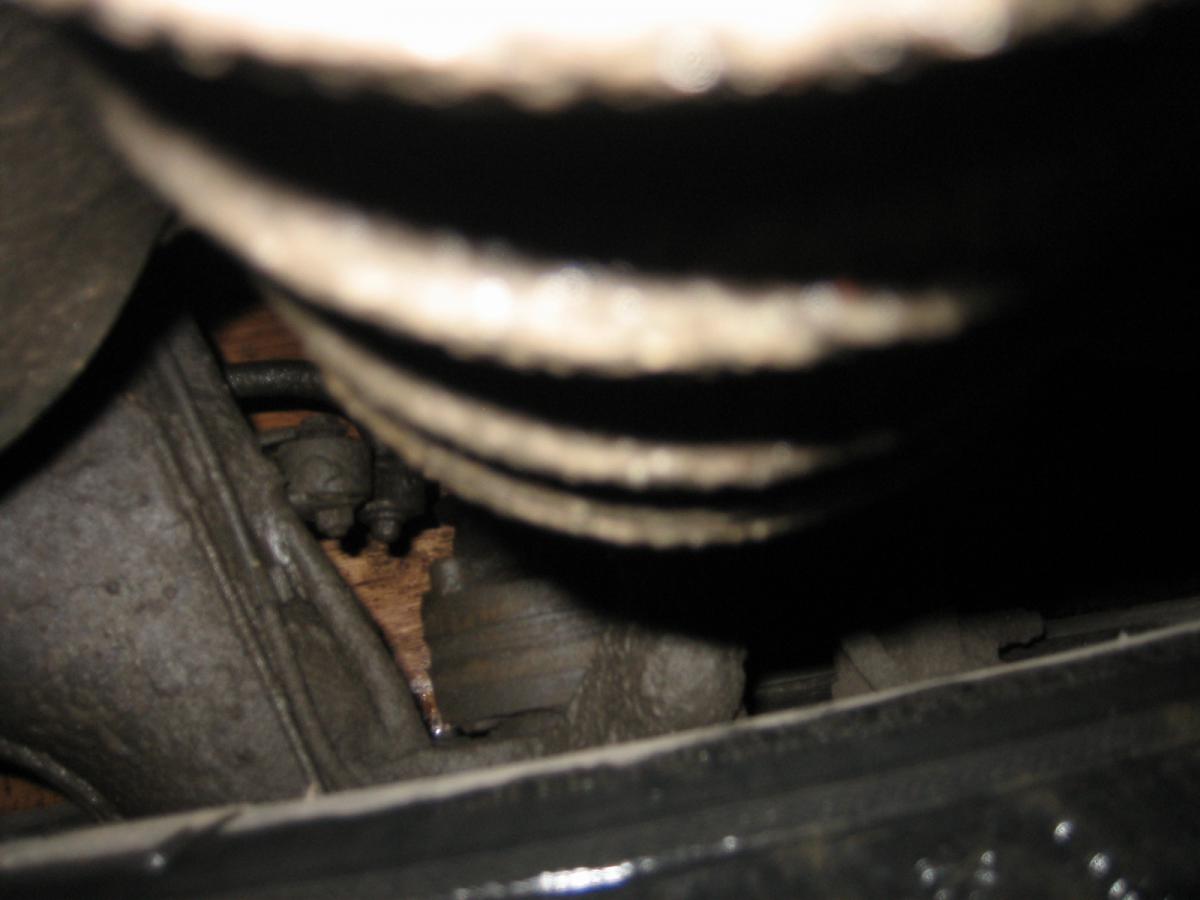
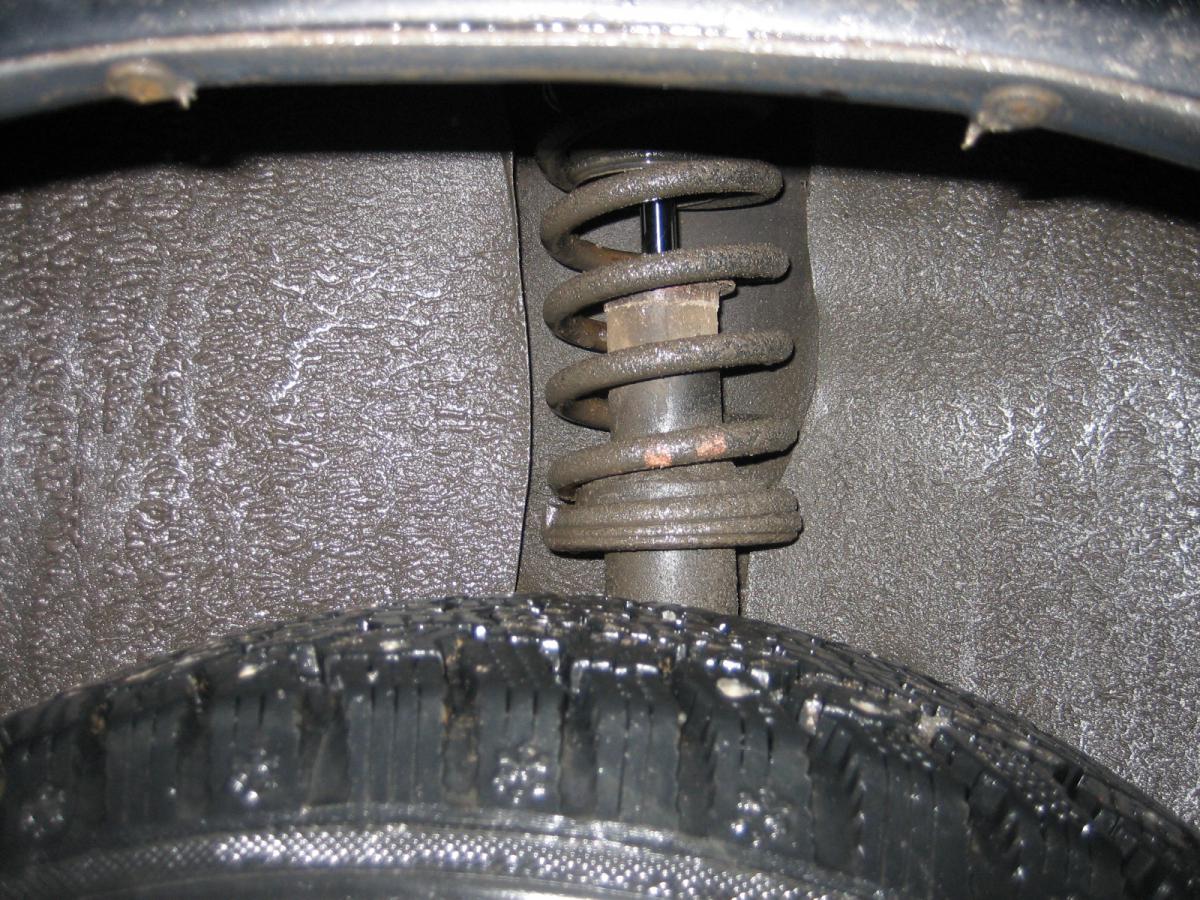
Будущая пневмо-БМВ на зимней резине, а ля внедорожник!

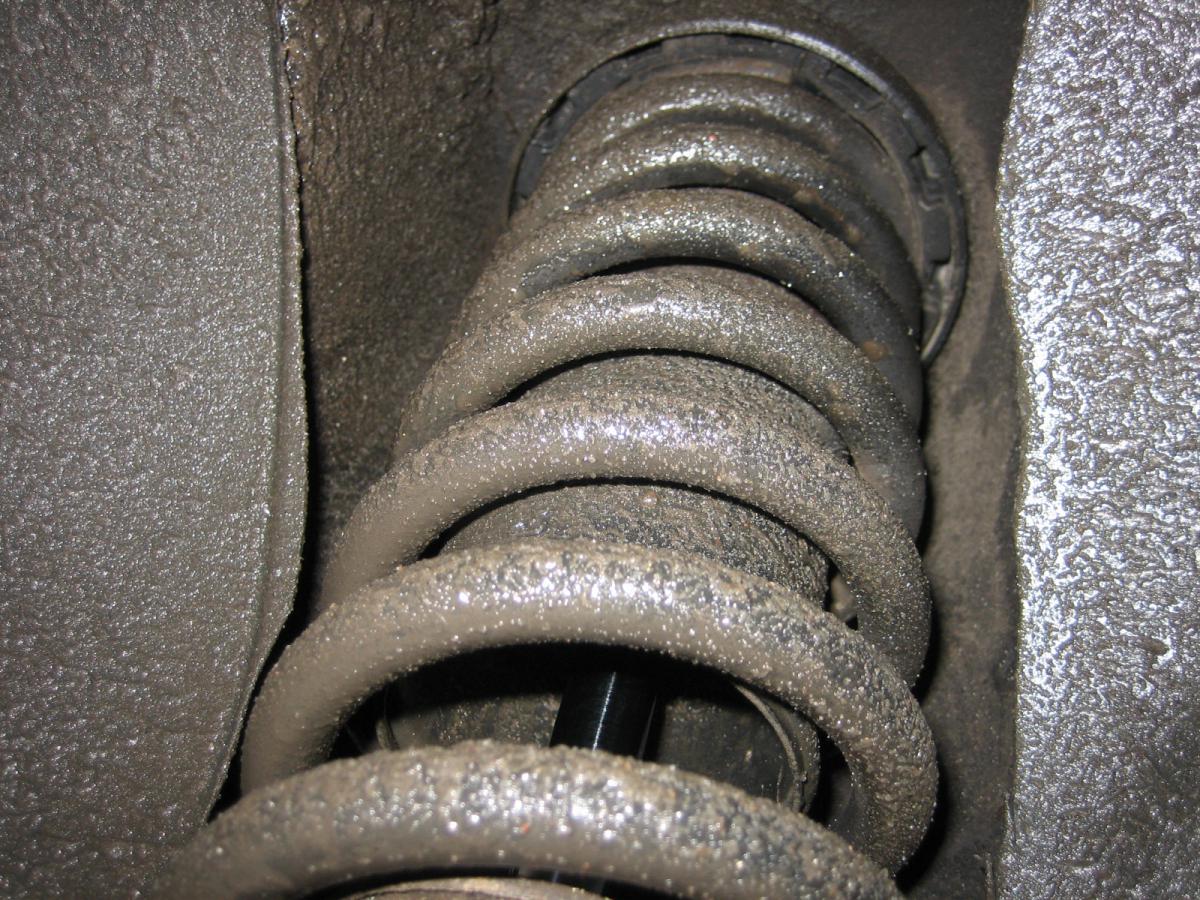
Пофоткал стойку:










Домкрат на максимум, 14см вверх, а колесо по прежнему стоит на земле

Замеры не снимал, грязно и холодно!
-
Вот версия программы, с временной задержкой действия и некоторыми функциями самодиагностики.
#include <LiquidCrystal.h>
#include <LiquidCrystalRus.h>
LiquidCrystalRus lcd(6, 7, 5, 4, 3, 2);
int state=0;
int state2=0;
int state3=0;
int state4=0;
int state5=0;
int avaria=0;
int avaria2=0;
int avaria3=0;
int avaria4=0;
int ustanovka=0;
int ustanovka2=0;
int ustanovka3=0;
int ustanovka4=0;
long previousMillis = 0;
long previousMillis2 = 0;
long previousMillis3 = 0;
long previousMillis4 = 0;
long previousMillis5 = 0;
int obriv = 0;
int obriv2 = 0;
int obriv3 = 0;
int obriv4 = 0;
#include <EEPROM.h>
int dveknopky=0;
int predustanovka=0;
int regim=1;
int eeprom=0;
int knopka=0;
int knopka2=0;
int knopka3=0;
int analog=0;
int analog2=0;
int analog3=0;
int analog4=0;
int sek=0;
int sek2=0;
int sek3=0;
int sek4=0;
int flag1=0;
int flag2=0;
int flag3=0;
int flag4=0;
void setup()
{
pinMode(14,INPUT);
pinMode(15,INPUT);
pinMode(16,INPUT);
pinMode(17,INPUT);
digitalWrite(14, HIGH);
digitalWrite(15, HIGH);
digitalWrite(16, HIGH);
digitalWrite(17, HIGH);
lcd.begin(16, 2);
pinMode(19,INPUT);
pinMode(18,INPUT);
pinMode(0,OUTPUT);
pinMode(1,OUTPUT);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(11,OUTPUT);
pinMode(12,OUTPUT);
pinMode(13,OUTPUT);
}
void loop()
{
if (millis() -previousMillis5 >=100)
{
previousMillis5 = millis();
state5=!state5;
if(state5==1)
{
lcd.clear();
}
}
if(eeprom==0)
{
regim=EEPROM.read(0);
eeprom=1;
}
if(digitalRead(19)==HIGH&&digitalRead(18)==HIGH&&knopka3==0)
{
knopka3=1;
}
if(digitalRead(19)==LOW&&digitalRead(18)==LOW&&knopka3==1)
{
dveknopky=dveknopky+1;
if(dveknopky>1)
{
dveknopky=0;
}
if(dveknopky<0)
{
dveknopky=1;
}
knopka3=0;
delay(500);
}
if(dveknopky==1)
{
digitalWrite(0,LOW);
digitalWrite(1,LOW);
digitalWrite(8,LOW);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
lcd.setCursor(2,1);
lcd.print("Заблокирована");
lcd.setCursor(4,0);
lcd.print("Система");
}
else
{
if(analogRead(14)<=1010&&analogRead(15)<=1010&&analogRead(16)<=1010&&analogRead(17)<=1010)
{
if(digitalRead(19)==HIGH&&knopka==0)
{
knopka=1;
avaria=0;
}
if(digitalRead(19)==LOW&&knopka==1)
{
knopka=0;
regim=regim+1;
if(regim>3)
{
regim=3;
}
EEPROM.write(0,regim);
sek=0;
}
if(digitalRead(18)==HIGH&&knopka2==0)
{
knopka2=1;
avaria=0;
}
if(digitalRead(18)==LOW&&knopka2==1)
{
knopka2=0;
regim=regim-1;
if(regim<1)
{
regim=1;
}
EEPROM.write(0,regim);
sek=0;
}
if(regim==1)
{
predustanovka=300;
if(avaria==0&&avaria2==0&&avaria3==0&&avaria4==0)
{
lcd.setCursor(4,0);
lcd.print("нижний");
}
}
if(regim==2)
{
predustanovka=600;
if(avaria==0&&avaria2==0&&avaria3==0&&avaria4==0)
{
lcd.setCursor(4,0);
lcd.print("средний");
}
}
if(regim==3)
{
predustanovka=900;
if(avaria==0&&avaria2==0&&avaria3==0&&avaria4==0)
{
lcd.setCursor(4,0);
lcd.print("верхний");
}
}
if(flag1==1)
{
if (millis() -previousMillis >=500)
{
previousMillis = millis();
state=!state;
if(state==1)
{
sek++;
}
if(sek>=30)
{
sek=30;
}
}
}
analog=analogRead(14);
if(analog>999)
{
analog=999;
}
if(analog<100)
{
analog=100;
}
if(analog>(predustanovka+5)&&sek>=3)
{
flag1=1;
if(sek<30)
{
digitalWrite(13,LOW);
digitalWrite(0,HIGH);
}
else
{
avaria=1;
digitalWrite(13,LOW);
digitalWrite(0,LOW);
}
}
if(analog>=(predustanovka-10)&&analog<=(predustanovka+10))
{
ustanovka=1;
avaria=0;
flag1=0;
digitalWrite(0,LOW);
digitalWrite(13,LOW);
sek=0;
}
else
{
ustanovka=0;
flag1=1;
}
if(analog<(predustanovka-5)&&sek>=3)
{
flag1=1;
if(sek<30)
{
digitalWrite(0,LOW);
digitalWrite(13,HIGH);
}
else
{
avaria=1;
digitalWrite(0,LOW);
digitalWrite(13,LOW);
}
}
if(flag2==1)
{
if (millis() -previousMillis2 >=500)
{
previousMillis2 = millis();
state2=!state2;
if(state2==1)
{
sek2++;
}
if(sek2>=30)
{
sek2=30;
}
}
}
analog2=analogRead(15);
if(analog2>999)
{
analog2=999;
}
if(analog2<100)
{
analog2=100;
}
if(analog2>(predustanovka+5)&&sek2>=3)
{
flag2=1;
if(sek2<30)
{
digitalWrite(12,LOW);
digitalWrite(1,HIGH);
}
else
{
avaria2=1;
digitalWrite(12,LOW);
digitalWrite(1,LOW);
}
}
if(analog2>=(predustanovka-10)&&analog2<=(predustanovka+10))
{
ustanovka2=1;
avaria2=0;
flag2=0;
digitalWrite(1,LOW);
digitalWrite(12,LOW);
sek2=0;
}
else
{
ustanovka2=0;
flag2=1;
}
if(analog2<(predustanovka-5)&&sek2>=3)
{
flag2=1;
if(sek2<30)
{
digitalWrite(1,LOW);
digitalWrite(12,HIGH);
}
else
{
avaria2=1;
digitalWrite(1,LOW);
digitalWrite(12,LOW);
}
}
if(flag3==1)
{
if (millis() -previousMillis3 >=500)
{
previousMillis3 = millis();
state3=!state3;
if(state3==1)
{
sek3++;
}
if(sek3>=30)
{
sek3=30;
}
}
}
analog3=analogRead(16);
if(analog3>999)
{
analog3=999;
}
if(analog3<100)
{
analog3=100;
}
if(analog3>(predustanovka+5)&&sek3>=3)
{
flag3=1;
if(sek3<30)
{
digitalWrite(11,LOW);
digitalWrite(8,HIGH);
}
else
{
avaria3=1;
digitalWrite(11,LOW);
digitalWrite(8,LOW);
}
}
if(analog3>=(predustanovka-10)&&analog3<=(predustanovka+10))
{
ustanovka3=1;
avaria3=0;
flag3=0;
digitalWrite(8,LOW);
digitalWrite(11,LOW);
sek3=0;
}
else
{
ustanovka3=0;
flag3=1;
}
if(analog3<(predustanovka-5)&&sek3>=3)
{
flag3=1;
if(sek3<30)
{
digitalWrite(8,LOW);
digitalWrite(11,HIGH);
}
else
{
avaria3=1;
digitalWrite(8,LOW);
digitalWrite(11,LOW);
}
}
if(flag4==1)
{
if (millis() -previousMillis4 >=500)
{
previousMillis4 = millis();
state4=!state4;
if(state4==1)
{
sek4++;
}
if(sek4>=30)
{
sek4=30;
}
}
}
analog4=analogRead(17);
if(analog4>999)
{
analog4=999;
}
if(analog4<100)
{
analog4=100;
}
if(analog4>(predustanovka+5)&&sek4>=3)
{
flag4=1;
if(sek4<30)
{
digitalWrite(10,LOW);
digitalWrite(9,HIGH);
}
else
{
avaria4=1;
digitalWrite(10,LOW);
digitalWrite(9,LOW);
}
}
if(analog4>=(predustanovka-10)&&analog4<=(predustanovka+10))
{
ustanovka4=1;
avaria4=0;
flag4=0;
digitalWrite(9,LOW);
digitalWrite(10,LOW);
sek4=0;
}
else
{
ustanovka4=0;
flag4=1;
}
if(analog4<(predustanovka-5)&&sek4>=3)
{
flag4=1;
if(sek4<30)
{
digitalWrite(9,LOW);
digitalWrite(10,HIGH);
}
else
{
avaria4=1;
digitalWrite(9,LOW);
digitalWrite(10,LOW);
}
}
if(ustanovka==1&&ustanovka2==1&&ustanovka3==1&&ustanovka4==1)
{
lcd.setCursor(3,1);
lcd.print("Установлен");
}
else
{
if(avaria==1||avaria2==1||avaria3==1||avaria4==1)
{
delay(1000);
lcd.setCursor(5,0);
lcd.print("АВАРИЯ");
lcd.setCursor(3,1);
lcd.print(!avaria);
lcd.setCursor(6,1);
lcd.print(!avaria2);
lcd.setCursor(9,1);
lcd.print(!avaria3);
lcd.setCursor(12,1);
lcd.print(!avaria4);
}
else
{
lcd.setCursor(1,1);
lcd.print(analog);
lcd.setCursor(5,1);
lcd.print(analog2);
lcd.setCursor(9,1);
lcd.print(analog3);
lcd.setCursor(13,1);
lcd.print(analog4);
}
}
}
else
{
if(analogRead(14)>=1010)
{
obriv=0;
delay(1000);
}
else
{
obriv=1;
}
if(analogRead(15)>=1010)
{
obriv2=0;
delay(1000);
}
else
{
obriv2=1;
}
if(analogRead(16)>=1010)
{
obriv3=0;
delay(1000);
}
else
{
obriv3=1;
}
if(analogRead(17)>=1010)
{
obriv4=0;
delay(1000);
}
else
{
obriv4=1;
}
lcd.setCursor(2,0);
lcd.print("ОБРЫВ ДАТЧИКА");
lcd.setCursor(3,1);
lcd.print(obriv);
lcd.setCursor(6,1);
lcd.print(obriv2);
lcd.setCursor(9,1);
lcd.print(obriv3);
lcd.setCursor(12,1);
lcd.print(obriv4);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(8,LOW);
digitalWrite(12,LOW);
digitalWrite(1,LOW);
digitalWrite(13,LOW);
digitalWrite(0,LOW);
}
}
}
нашел тут -
Ну да, логично!!
А что на счет схемки? Не поделишься, или это коммерческий проект? -
А сколько у тебя клапанов? если 5 то можно банально диодами всё закомутировать! Система будит думать что управляет 8ю а на самом деле 5ю...
А схемку этого всего там не выложили? И ссылочку на сайт не помешало бы!
-
KYB 664014 VW Golf 2
длинна тела 332ммдиаметр-38,5
диаметр штока-20
ход штока 205мм (от тела до резьбы)
KYB 363060
длинна тела с пяткой 335диаметр-38,5
диаметр штока-20
ход штока 162 (от тела до места под подшипник)
KYB 663009 VW Golf 1
длинна тела 320ммдиаметр-38,5
диаметр штока-20
ход штока 185мм (от тела до места под подшипник)
У аналогов от МОНРО размеры такие же!!! У остальных 41,5мм диаметр тела!


 Побежал покупать те алюминиевые шняги с надписью "KING" и колхозить из них доп-ресивера для пневмы
Побежал покупать те алюминиевые шняги с надписью "KING" и колхозить из них доп-ресивера для пневмы 


 Когда время правки увеличат???
Когда время правки увеличат??? 


























еще один бюджетный контролер
в Контроллеры,клапана, автоматика и управление
Опубликовано
В Харькове много чего есть, но плат с первого поста нет :((
http://www.kosmodrom.com.ua/prodlist.php?page=0&name=Arduino+&okbutton=%CF%EE%E8%F1%EA
Можешь хотя бы расписать (для чайников) на какие порты к Arduino Nano цепляются датчики, дисплей (с задней платой), кнопки управления?
Сфоткать твою рабочую модель на столе, если еще не разобрал?
Дисплей 2х20 или 2х16?