Altero
-
Постов
69 -
Зарегистрирован
-
Посещение
-
Победитель дней
4
Тип контента
Профили
Форумы
События
Весь контент Altero
-
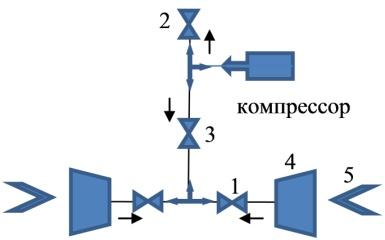
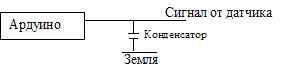
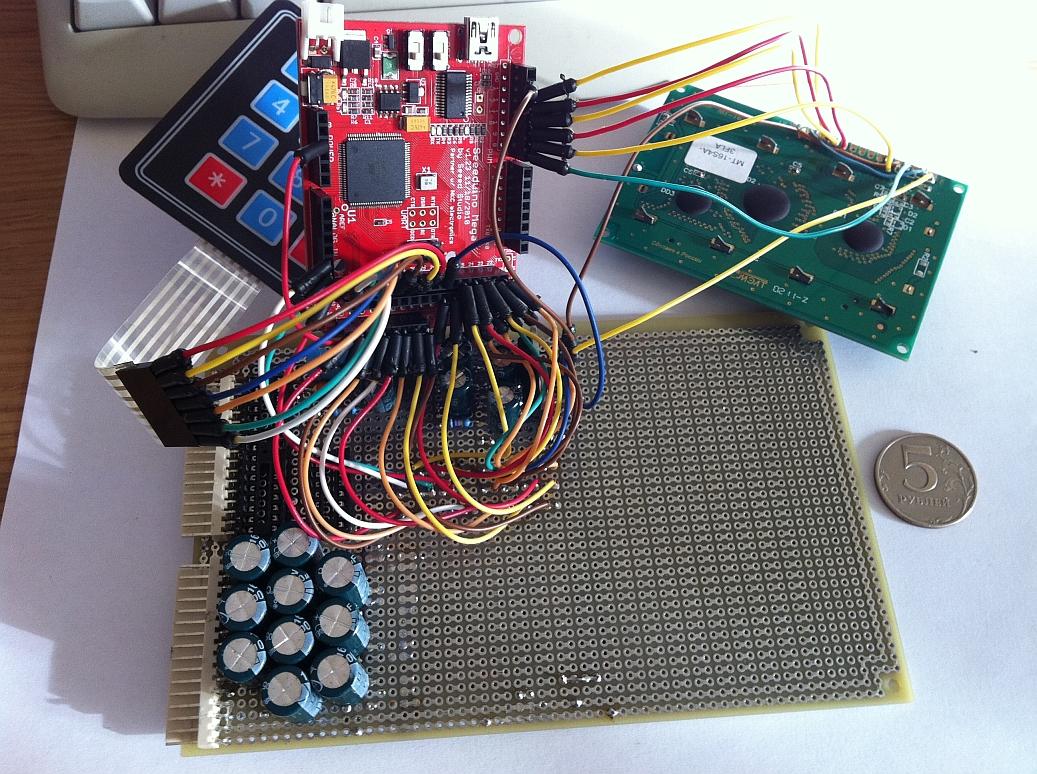
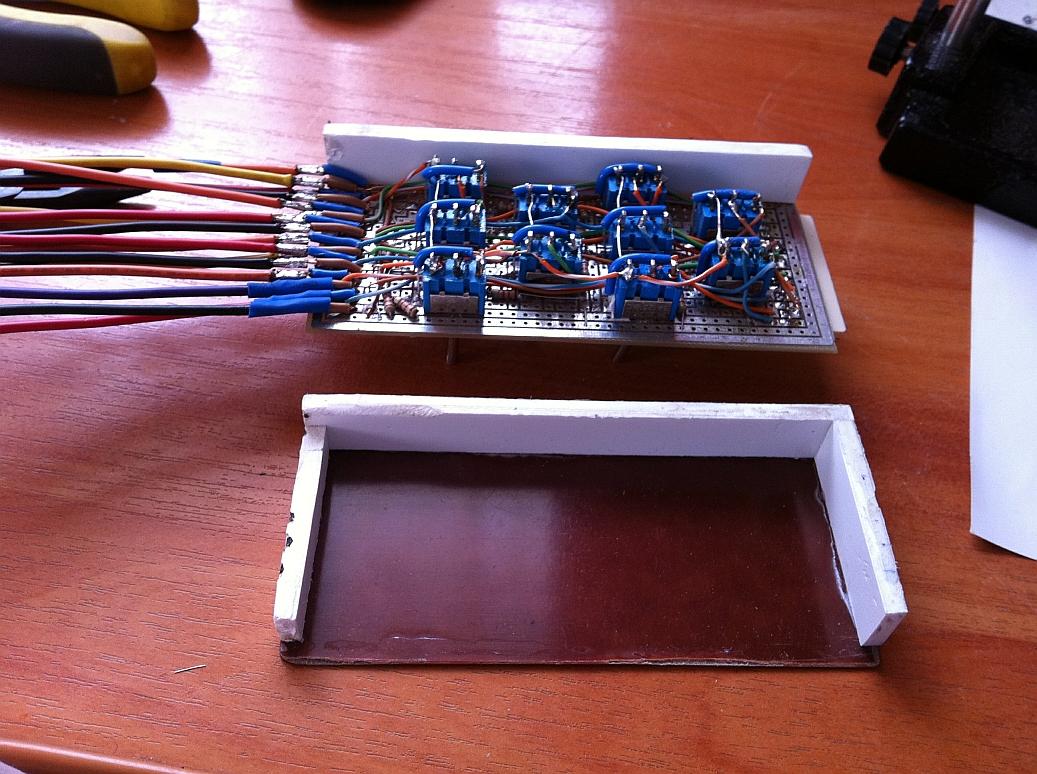
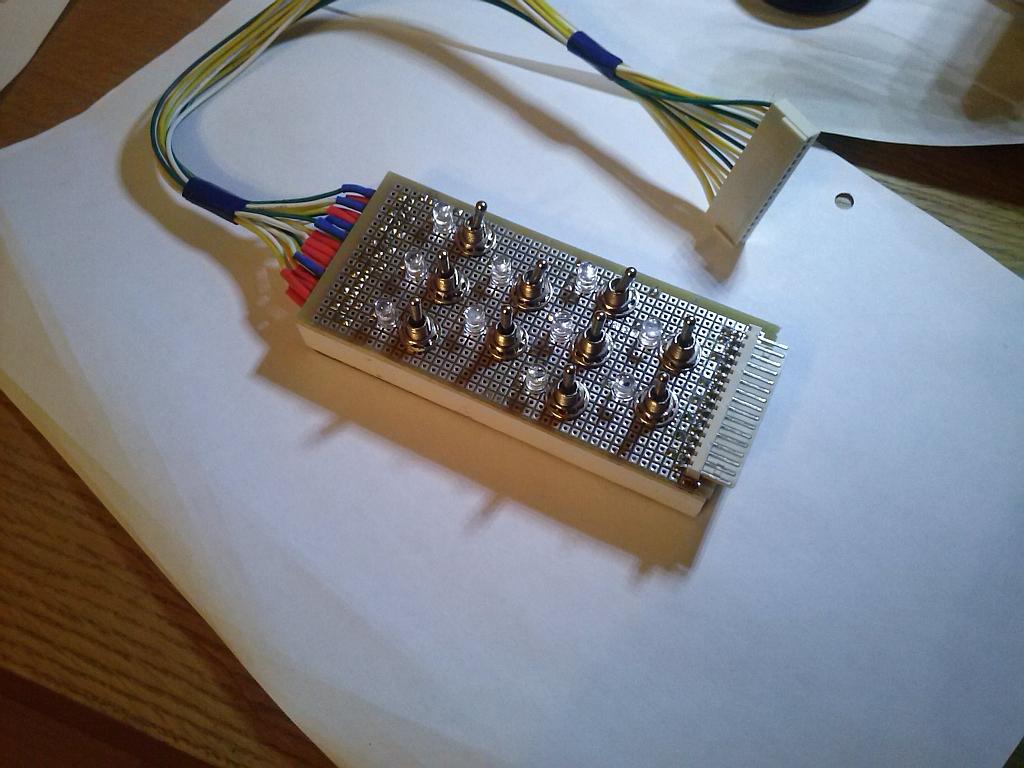
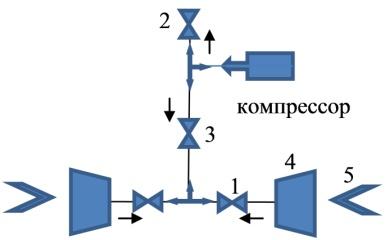
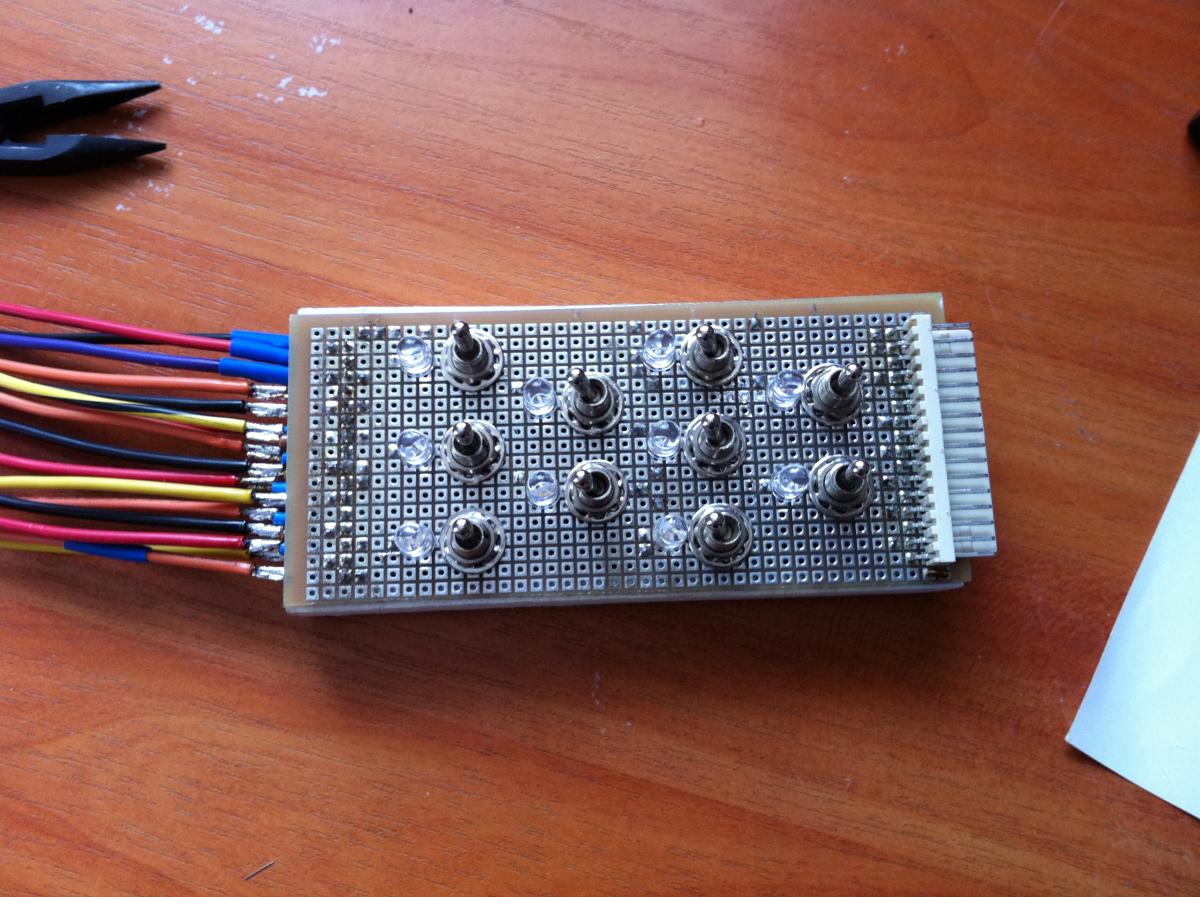
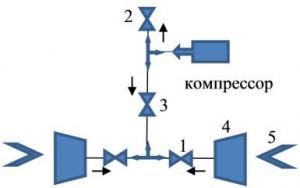
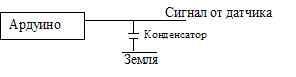
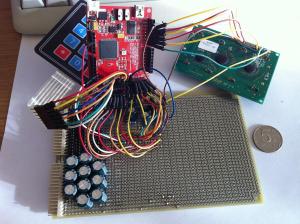
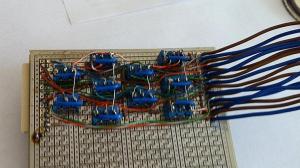
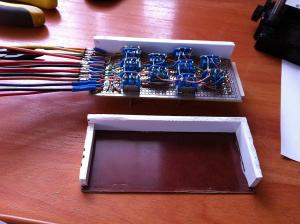
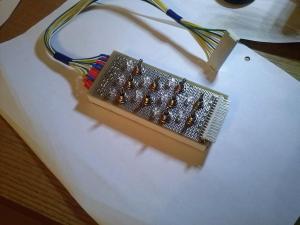
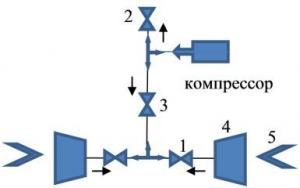
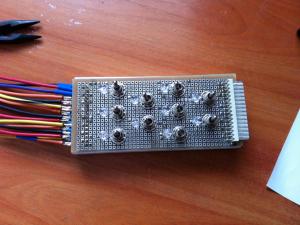
Выложу и я свои старания После нескольких лет эксплуатации своего Хитрила стала меня давить жаба. Типа вседорожник, а при малейшем вывешивании колес встает на месте как пузотерка. Выход – или блокировка межколесного дифа, хотя бы заднего, что офигенно сложно или пневмоподвеска. Началось, как правило, с изучения форумов. Было решено строить сразу с автоматическим регулированием, благо сейчас для комплектации есть все, только бабосы давай. Подушки заказал на форуме, клапана Lovato на станции ГБО, трубки и фитинги в камазовских магазинах. На сайте http://devicter.ru заказал Seeeduino_Mega_v1.23 с проводами и матричной 12 кнопковой клавиатурой, на сайте http://www.melt.com.ru индикатор MT-16S4A, компрессор Беркут 17. И еще по мелочи куча всего. От датчиков давления не сразу, но отказался, не вижу необходимости. С монтажом клапанов, укладкой трубок и сбором воздушной схемы особых проблем не было и по времени это не очень долго. Схема была выбрана 4-контурная, чтобы сразу и с запасом на все будущие хотелки. Оснастить все колеса отдельным управлением и потом хоть по косогорам катайся, как запрограммируешь. Пока без передней оси схема такая: 1 клапан разобщения подушек 2 сбросной клапан 3 клапан разобщения осей (с учетом будущей передней оси, пока не нужен) 4 подушка 5 датчик высоты В направлении стрелки удержание давления (клапана ГБО) Основной геморрой конечно с автоматикой. Схема блока управления такая: два стабилизатора питания. Один на 9 вольт для ардуинки, кренка на плате, постеснялся я что-то напрямую на 12-14 вольт ее цеплять. Адаптер магазинный 12-5 вольт для питания датчиков и управления клапанами. Сигнал с датчиков приходят к ардуине через конденсаторы 470мФ для сглаживания пульсаций. Это многовато, достаточно 330мФ, запаздывает немного, но переделывать не буду Управление клапанами выбрано мной неудачно. В погоне за бюджетностью решил сделать сам. От ардуины сигнал идет max 40мА, магазинные реле на 5В 10А для управления клапанами требуют порядка 90мА, поэтому пришлось поставить промежуточный драйвер реле на микросхемах L2722. Принцип изготовления отсюда: http://easyelectronics.ru/upravlenie-moshhnoj-nagruzkoj-postoyannogo-toka-chast-2.html. ULN2003 в городе не нашел, она бы поудобнее была. Получился колхоз, буду переделывать. Долго искал подходящую коробку по размерам, для блока управления. Подошла китайская кормушка для птиц. Хотя теперь знаю, что и самоделка из 5мм пластика неплохо выглядит. В итоге получилось так: Датчики высоты из датчиков положения дроссельной заслонки 2110. У токаря заказал корпуса для подшипника из алюминия с валом и крышкой, вал стальной. Плечо датчика из шпильки М4, у меня сделана длина плеча 13см. Ролики на плечо из двойного блока, от ролика до рычага колеса тяга из стальной проволоки Ø3, на конце резьбу нарезал для регулировки. Не совсем удачная конструкция, внизу тоже нужен ролик или шарнир. Внизу проволока по резьбе уже отламывалась, пришлось ослаблять гайки и делать небольшой люфт. С датчиками еще вылезла проблема – примерзают в межсезонье, да так что плечо загибается. Пришлось из мебельных заглушек делать проставки между валом и корпусом датчика и густо мазать литолом. Внутри в корпусе подшипник тоже с литолом. Датчик на 2110 ставится через поролоновое кольцо, его я в магазинах не нашел, поэтому между корпусом и датчиком поставил тонкое резиновое кольцо. С местом установки выбор был небольшой, только за амортизатором и в крайних верхних положениях колеса за датчик задевало ухо амортизатора, к которому тормозной шланг крепиться. Пришлось эти уши срезать и закреплять шланги пластиковым хомутом. При обычном клиренсе и приблизительно ровном положении машины датчик крепил так, чтобы плечо датчика было в приблизительно среднем положении, все неточности вытянулись формулой. Длину плеча подбирал с запасом хода у датчика. У меня при мин и макс положениях колеса используется порядка 80% хода датчика. Калибровка датчиков простая. Замерил две крайних точки при высоком и низком положении колеса. Поддомкратил см на 7-10, замерил см до арки и показания на дисплее. Потом наехал этим же колесом на бордюр и снова замерил. И так каждый датчик. Получилось к примеру при 76см от крыла до земли датчик правый задний показал 568, при 82см – 664. Строил уравнение прямой по двум точкам, отсюда http://www.math.by/geometry/eqline.html , вставил уравнение в программу и получил на дисплее сантиметры высоты от земли до арки. Для ручного управления клапанами на этапе отладки программы и для аварийных случаев изготовил еще блок из трехпозиционных переключателей. 1 положение типа автомат, от ардуины, 2 отключен и 3 включен принудительно. Светодиоды показывают наличие сигнала от ардуины на включение клапана. Корпус из 5мм пластика и текстолита Расположение клапанов под капотом и вокруг запаски сзади показывать смысла не вижу, расположил не блоками, а где место было. Компрессор на аккумуляторе. При скорости выше 100 включения не слышно. Максимальный клиренс, вживую безобразней смотрится. Очень высоко. Фотографий снизу нет, ямы нет. Да и нет там ничего, вся подушка в колесной нише. Блок управления в машине Блок управления в походном состоянии Управление системой: 1 норма авто 4 максимум авто 7 ручной, только дисплей 3 одной кнопкой соединение (разьединение) межосевых подушек, против диагоналки 0 подьем при удержании, переключение в ручной # спуск при удержании, переключение в ручной На кнопку 2 планировал вкл откл ресиверы, пока не нужны. Описание скетча (программы) тут http://pnevmopodveska-club.ru/topic/459-programma-dlia-arduino/ В итоге система получилась Plug & Play. За 3 месяца только по трассе тысяч 7 намотал, никаких неисправностей, все работает как надо. Прояснились некоторые нюансы и надо кое-что переделывать. Фитинги китайские, один на глазах развалился, ближний от компрессора. Видимо от температуры, перегрел пока экспериментировал– надежды на них нет, менять. Думаю брать SMC http://www.pnevmo-gid.ru/content/view/150/ и трубки такие же. В Тюмени они есть на pnevmoz.ru и ценник гуманный, чуть дороже китайских и дешевле камоцци. Трубки обычные камазовские под увеличением выглядят как будто их слоны жевали, царапины, борозды, лохмотья какие-то, сложно загерметизировать – менять. В сравнении - камоцци как зеркало. Подушки: мягкие очень для меня. Поршень меньше не сделать, диаметр аморта 51мм, давление в ней поднять не получиться. Слышишь меня, Italius? – менять. Смотрю в сторону BlackTech 11030, они на 4см короче и пожестче будут. Управление клапанами неудачное, при подаче питания на микросхемы двухсекундное включение клапанов (и компрессора) – менять. Самодельный колхоз типа мосфетов уже не манит, все уже придумано http://devicter.ru/goods/Relay-shield-1 Все адреса не рекламы ради, а истины для. Кажется все свои грабли расписал. Самое сложное подобрать подушки. Диаметр аморта и вес оси это основные параметры. Долго и придирчиво выбирать лучше, чем поставить вроде бы подходящую. Подгонять ее по месту занятие более утомительное и не всегда можно добиться нужного результата. Первый блин комом это нормально, но лучше без него. И пневма без автоматики, на мой взгляд, это небезопасно как минимум. За рулем лучше на дорогу смотреть, а не за уровнем следить.













-
Все правильно, это я сразу не вьехал, что речь про паразитную частоту идет. Все что больше или равно собственной частоте не отследишь, там куча мала из ям и собственных колебаний. Вот меньше частоту дают только внешние факторы, типа широких лежачих полицейских (милицейских). Их еще можно отследить.
-
@PALN, От собственной частоты подвески не спрячешься. У заводских подвесок стремятся к 1-1,5Гц и корректировать все что больше нет смысла.. Паразитная бывает больше (на ямках) и меньше (на волнах, на севере такое часто). Мне кажется надо рассматривать возможности даже не контроллера, а всей схемы. От датчика через контроллер и рессивер до подушки. Даже на дюймовых трубках и эл.клапанах скорость реакции схемы меньше 1 секунды не сделать. Есть смысл рассматривать время 2-5 секунд, потому что пневма по сравнению с гидравликой более инерционна. Если нужно быстрее 2 секунд реагировать, то тут или гидравлика или кран уровня пола. Контроллер может и среагирует, но к программе потребуются трубки клапана определенного диаметра, рессивер не меньше каких то литров суперкомпрессор и минимальные расстояние между всем этим. Неуниверсально как то, только для конкретной машины, ИМХО.
-
Вообще-то колебания подвески не на ямах измеряются. И скорость тут не при чем.
-
0,6 пустая, 0,8 груженая. Ну эти цифры кто б замерял. Все на ощущениях. По теориям норма около 1Гц, а у нас...
-
Дык, машинки вон как по разному себя ведут. Мне 15 секунд норма, Рустему экспериментировать приходиться. Но на 4 странице ветки стало понятно об чем речь, прогресс.
-
И что сильно крениться? Так что выравнивать необходимо? У тебя же подушки не соединяются в движении, клапана на каждой стоят. К тому же на бубликах крены еще меньше чем на сливах. Если да тогда пробуй среднюю за 2 секунды. Вошел в поворот - 2 сек выровнял, вышел 2 сек выровнял.
-
У меня нет изменений высоты в повороте. Молчит контроллер. Фактически он у меня отслеживает высоту центра оси. Нечего выравнивать. У тебя машина вошла в поворот, накренилась и после поворота с тем же креном продолжает ехать? Ценробежная сила после поворота исчезает. Должна сама выравниваться, без контроллера.
-
Как уже писал выше, среднее за 15 сек и потом мгновенная реакция меня устраивает. На ходу высота измениться только если травить вдруг начнет. Или груз сползет в твоем случае. Часто проверять уровень вроде ни к чему, другое дело остановка. Погрузка, разгрузка. Сели пассажиры назад и не дольше чем через 15 сек он поднимает машину. От посадки до трогания с места, ну 5 секунд. На ходу уже поднимает. Затачивать время реакции под скорость смысла не вижу, пусть электричество работает, упал и сразу отжался.
-
Надо определиться, а то разговор ни о чем. У тебя абстрактный вопрос по контроллеру, как ему себя вести? Тебе не нравится поведение машины, какое? Подвеска у тебя 4 контурная? Или мы про повороты говорим? А если под рессоры пластину подложить, 2-3 см. Вопрос дилетанта, нет у меня рессор.
-
Он у меня реагирует на сумму показаний датчиков на оси, как будто один датчик по центру. На повороты не реагирует т.к. сумма не меняется или незначительно. Коррекции после поворота не требуется. По 1 вопросу: какие стоят датчики определения именно крена? По 2 так? ...мне не нужно чтоб машина проседала даже на мм, нету просто запаса в подвеске, я его убрал и внезапный перегруз на бок это не мои мысли, это сочетание нескольких обстоятельств, если попробовать избегать этих обстоятельств, то в принципе других грузов не найти... машина всегда проседает, на хорошей яме до отбойников никуда не денешься. Перегруз набок - это установка клапана на каждую подушку. Я правильно понимаю?
-
Походу мы все не понимаем что ты хочешь узнать. 1. Как твой контроллер должен узнать, что ты в повороте? 2. Что происходит с твоей машиной в повороте? Или не в повороте? 3. Что ты хочешь от контроллера? Как он по твоему должен реагировать на неровности?
-
На легковых крены на пневме еще меньше чем на пружинах, нет такой проблемы. На 4 контурной тоже нет проблем. наоборот нужно определять затяжной поворот для того чтобы контроллер НИЧЕГО в повороте не делал. За 30 сек или 2 минуты ничего не произойдет. А если груженая газель и должна ехать как по зеркалу, то надо акселерометр и кран уровня пола ставить, он шустренький, поймает и торможение и все на свете. И читать мануалы по двухэтажным автобусам.
-
Бюджетность не последний параметр, хотя тут скупой платит дважды. Такое наверно поставлю http://devicter.ru/goods/Relay-shield-1 А лампы это вариант, я люблю классику
-
Рустем, у меня раз в секунду опрос датчиков. За 15 секунд набирается средняя. По ней, по средней, раз в 15 сек контроллер определяет пора что-то включать или нет. Нормально работает. Только у меня ресивера общего нет и спускной клапан я задушил. Опускается и поднимается медленно, значит безопасно. И на ходу и стоя и лежа раз в 15 секунд. Перед плохой дорогой всегда остановишься и успеешь авто поднять. Активной подвески на пневме не получиться, ее задача контроль уровня, а не поиск неровностей дороги. И акселерометр не сильно поможет, разве что у кого то есть спецучастки дороги, под которые отдельно программу писать надо. На обычной дороге машина на ходу постоянно гуляет вокруг нормы +-1см точно.
-
У меня промежуточный драйвер реле на микросхемах L2722. Так вот они сейчас в минус 15 глючить начали, не 5 вольт на реле выдают, а в районе 2,5-3. Потом согреваются и работают, хз.
-
Данная программа (прошивка, скетч) для микроконтроллера из любительского роботостроения http://arduino.ru/ для управления пневмоподвеской на одной оси для такой схемы: 1 клапан разобщения подушек 2 сбросной клапан 3 клапан разобщения осей ( с учетом будущей передней оси, пока не нужен) 4 подушка 5 датчик высоты В направлении стрелки удержание давления (клапана ГБО) Автоматически отслеживает два уровня, имеет ручной режим и принудительный подьем опускание в любое положение в ручном режиме
-
Аварийный режим есть, такая вот приставка к блоку управления На ардуине дисплей завязан и травля небольшая есть, корректировать все же приходится.
-
Да просто опасаюсь его на морозе бросать, может зря. Ардуино мне кажется для бытовых целей заточен. То есть от 0 и выше. Не нашел информации на эту тему, нет гарантии. Вдруг сдохнет, пешком пойдешь, да еще ждать пока закажешь. Хотя после ночи в минус 17 он у меня исправно работал. У нас и в минус 30 приходиться ездить. Нужна Гарантия морозоустойчивости. Может кто гонял его на хорошем морозе, отпишитесь.
-
Установи себе огромный пневмобаллон от прицепа с поршнем от монро 30, замечательным таким поршнем и тогда будет понятно о чем пытаюсь сказать. Будешь ловить и верх и низ отбоя на каждом лежачем полицейском. Потому что обьем не соответствует. Длина у подушек, а значит и обьем отличается. Я думаю проще выбрать нужную подушку, чем переделывать и герметизировать самодельный поршень.
-
То есть возможность калибровки закладывается в программу для универсальности установки на любой автомобиль? Подключил контроллер, провел один раз калибровку датчиков, установил свои режимы и поехал? И при случае проверять калибровку. Тогда сорри, сразу не понял. Необходимая вещь в программе. Без нее не поедешь.
-
@greega, 42!!!!! БАРА!!!! Если производитель делает такой запас прочности, то видимо не зря. Нагрузки на подушку в движении превышают статическую в несколько раз, это факт, и запас прочности необходим. Но вопрос то в другом. Нужно подобрать подушку под вес так, чтобы ход подушки от нормы до отбойника создавал определенное увеличение давления в подушке. Для одной модели например на 20% для другой на 160%, в зависимости от веса. Ход аморта у всех разный, поршни у подушек разные, длина подушек разная, но мне кажется систему найти можно.
-
Лучще гемор с установкой, чем... На моем примере: общий вес 1500, развесовка по осям 55/45. На заднюю ось 675. Возьмем 700 кг - на пустой, на груженой рекомендация не более 1170, возьмем 1200. В итоге на одной подушке задней оси от 350 на пустой машине до 600 груженой. Подбирать подушку на мой взгляд следует для груженой машины. Комфортным вертикальным ускорением по теории считается от 2 до 3g, это до 1800 кг. Для мягкости при пустой при нужде можно подключать доп. ресиверы. Нужно определить давление подушки при котором 600 кг удержит в минимальном диаметре поршня, и давление для 1800 кг при максимальном поршне. По этому перепаду давления определить общий размер подушки, длину, диаметр. Возможно для некоторых моделей из подушек для грузовиков не найдется подходящей. Придется искать эксклюзив.
-
Хороший пример, в смысле сочувствую. Для такой легкой машины нужны сливы, а не бублики. Вопрос темы: как подбирать подушки?
-
И я том же. Чтобы определить для наших потребностей: эта подуха на приору, эта на восьмерку, эта на тойоту спринтер. Чтобы потом в базе данных (если появится) любой неугомонный нашел РЕКОМЕНДУЕМУЮ ему подушку. По весу оси, по размерам аморта. И совет заодно: кому резать нижнюю чашку, кому спецстакан точить. Как то так.