

killka
-
Постов
16 -
Зарегистрирован
-
Посещение
Тип контента
Профили
Форумы
Календарь
Сообщения, опубликованные killka
-
-
6 минут назад, titanik сказал:
Я не писал что нужно выравнивать кузов в поворотах. Речь шла о гистерезисе, как раз о НЕ реакции на наклон кузова в поворотах. Гистерезис для этого достаточен в 4-6 секунд.
На машинах с задней балкой может и не надо. На многорычажках, изменение клиренса на 2-3 см изменяет углы схождения задних колёс. Руль криво будет стоять и на скоростях зад кидать будет. Я делаю сход-развал очень точно и на средней ездовой высоте. При опускании на пресет вниз у меня колёса разъезжаются на градус или доли градуса. Если оба колеса делают это одинаково, то на езде это не сказывается, а если одно колесо на вас, другое на Кавказ...?)))
Это особенность современных многорычажек. Делая контроллер универсальным нужно думать и об стабах поперечки дурацких и о типах подвески.
дауж, задние углы эт пиздец. с передними не до конца понятно что делать при изменении клиренса.
на тачках со штатной пневматикой, получается, подвеска меняет углы по минимуму? (симметрично, но ведь действительно, они должны меняться)
-
1 минуту назад, egor1974 сказал:
основной цикл мне кажется должен произойти при заводке машины..машина завелась...контролер это увидел и выровнял по пресесту..и как тронулась проверил и все
это то да, но парковаться придется на ровной площадке, а это далеко не всегда выходит
-
6 минут назад, egor1974 сказал:
вот он игнорит...в заданых пределах
для того чтобы.... не путать их с просадкой от нагрузки=) или утечки воздуха
-
Только что, titanik сказал:
Затяжной поворот, например. Крутой спуск и т.п
Динамическое изменение в полноценном варианте исключает из конструкции авто стабилизаторы поперечки. Забыли, что у нас почти у всех такие палки жёсткие снизу соединяют колёса? Это ещё один момент в данных для контроллера по идее. В Мерсах топовых нет стабов, их роль выполняет умная преумная пневма, которая динамически всё делает незаметно для водителя, держа кузоввсегда в нужном уровне и горизонте.
Но мы врятли получим такой контроллер и такой конфиг подвески.
зачем выравнивать затяжной поворот? чтобы на выходе пару секунд ехать под углом? при этом резкий маневр (типа лосиный тест) пневма хер отработает как стабилизатор, только гидравлика в аммортах такое сможет.
Вообще, так ли необходимо держать кузов в горизонте при корявой загрузке? Может 4 старых добрых упругих элемента с одинаковой характеристикой, нормально отслеживаемой не так уж плохо?
-
1 минуту назад, egor1974 сказал:
чтобы контролер знал ..что это ямка или кочка...а неподушка спустила
дык он и не знает что там происходит, просто игнорирует определенные режимы движения.
-
нах вообще нужен экран в салоне?
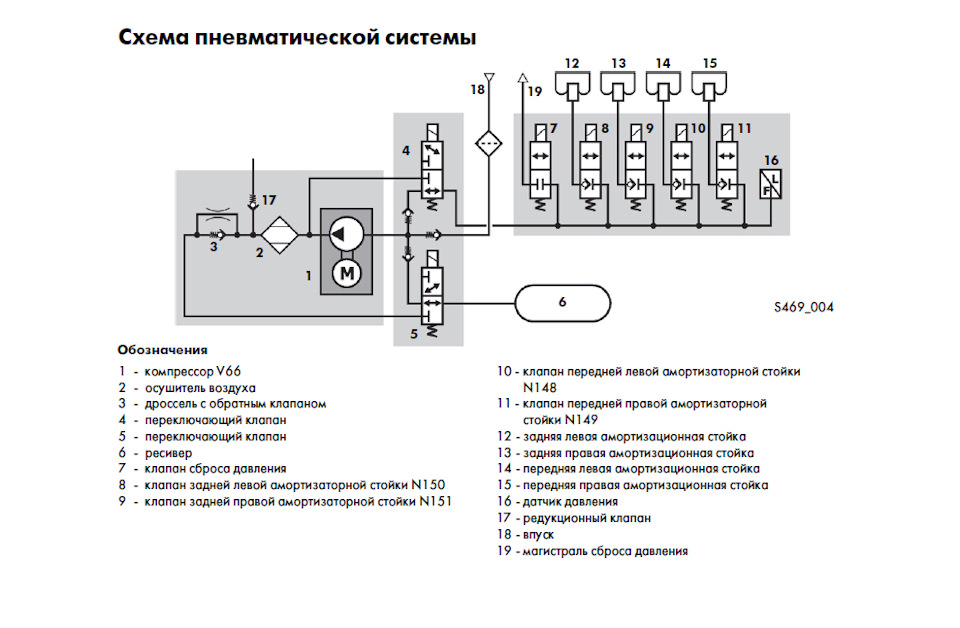
а у промышленных систем есть датчики ускорения и, кстати, датчик давления тоже (я прикладывал схему от туарега)
-
и как на ходу менять положение кузова?
двигаться равномерно и прямолинейно, без кочек и ям, и только тогда давить кнопку на пульте?
-
нафиг тогда гистерезис, если оно не в динамике следит?
-
зная давление будет известно какую часть нагрузки на подушку дает статическая нагрузка (вес груза/топлива) а какую часть- динамическая (поворот, порможение)
запомнив раз при стоящей машине поризведения давлений и высот для каждой подушки, до следующей остановки остается держать на том же уровне и клиренс сохранится.
если надо поднять/опустить- закачивать/сдувать расчетные объемы воздуха.
-
Товарищи. Ваша позиция заключается в том, чтобы динамически реагировать на любое изменение расположения рычагов относительно кузова.
Но, так как блок управления не знает чем вызываются эти изменения, приходится вводить ограничения его неусыпной бдительности ( ой, мы разгоняемся/тормозим/поворачиваем/наехали на кочку- отрабатывать не надо).
Я предполагаю что проще знать какая конфигурация подвески требуется и отслеживать ее в любой момент времени. Судя по всему, произведение P*V останется постоянным хоть при езде по буеракам, хоть при разгоне, повороте итп. Опускать/поднимать кузов это совершенно не мешает
-
если известно сколько должно быть воздуха в пневмоэлементах, ( упрощенно высота х давление) и зная что это произведение постоянно, то если система вдруг окажется не герметична, то будет понятно сколько нужно подкачать чтобы восстановить заданные параметры.
-
а зачем это вообще на ходу корректировки проводить? если дыр в системе нету?
-
если система герметична , то накачал нужное количество воздуха сразу и забыл. Какой гистерезис?
Кстати... туарег нф имеет датчик давления. И, судя по всему, поочередно проверяет им давление в подушках.
-
Вроде как герметичная подушка довольно быстро меняет объем, и не особо обменивается теплом с окружающей средой, стало быть процесс адиабатический.
Для адиабаты (давление х объем^k) - постоянная величина, k тож постоянная величина.
Площадь дна подушки можно считать известной, таким образом, количество воздуха можно оценить по высоте подушки и по давлению в ней.
Контроль объема воздуха сделает возможным отделить нагрузку на машину от рельефа на котором машина стоит.
Просто датчики уровня без датчиков давления в случае диагонального вывешивания не дадут представления о том, как будет расположен кузов, когда машина съедет на ровную поверхность.
Опять же если контроллер будет иметь в памяти карту (высота х давление) для ряда нагрузок, то будет возможность на любой поверхности надуть подушки таким образом, что при съезде на ровную поверхность, кузов окажется в горизонте.
-
Афтар, привет!
Почему-то все делают подвеску на упругих элементах рукавного типа без контроля количества воздуха в них. Мне кажется что для того чтобы иметь 4 упругих элемента с заданными характеристиками необходимо знать количество воздуха в упругом элементе. В связи с этим вопрос:
Скажи пожалуйста твой контроллер сможет управлять 4 контурами по закону (давление х высота) = const для каждой подушки?
Начало долгого пути по постройке контролера
в Контроллеры,клапана, автоматика и управление
Опубликовано
так стоп еще вопрос... тоесть получается при кривой загрузке на пружинах и со многорычажкой сздади машина тоже рулит хз куда?