Поиск
Показаны результаты для тегов 'tems'.
Найдено 1 результат
-
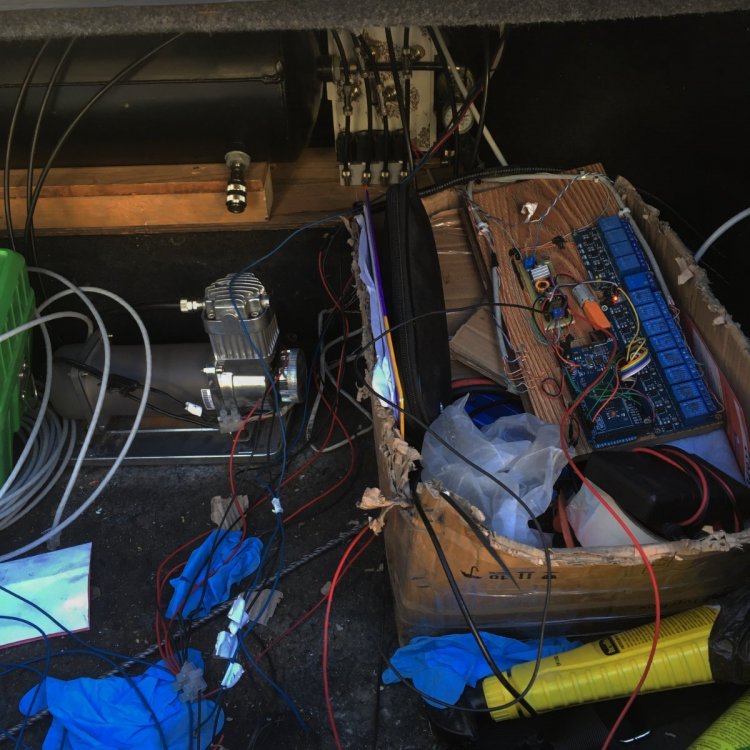
 Контроллер прошел через 3 стадии, в каждой истории свои плюсы и минусы. История 1: Изначально это 4х контурная система. Управление происходило путем считывания 4х датчиков давления и еще 1 датчика давления на рессивере. Контроллер считывал показания давления и качал передние стойки, потом одну стойку оставлял в покое, а вторую докачивал. После качал задние по тому же принципу. Сравнять давление клапанами на 8 трубке довольно сложно даже микроконтроллеру. Даже при кратковременном открывании клапана, давление резко выплевывалось в датчик и на этот момент открытия, напряжение (показание) скачет, контроллер понимает, что качать хватит и по закрытию клапана давление получается ниже, чем планировалось установить. Если провести больше итераций на установку определенного давления, в теории можно свести давление по оси в одинаковое значение. А так же программно определив сглаживающий фильтр, можно убрать ступеньку от резкой смены давления. Опять же фильтр должен быть адаптивен к разнице давления рессивера и стойки, адаптивен к разнице фактического давления и устанавливаемого. Напомню, здесь проблема в датчиках давления, которые при открытии клапанов кратковременно дают ложные значения. Тут появляется вторая проблема. Если давление на задней и на передней оси разное. Тогда сравняв давление на переде, при том что давление сзади между стойками разнится, Мы выставляем равное давление сзади, но с этим теряем равенство спереди. Т.к. при разном давлении сзади передняя часть по разному нагружается. Прочтите внимательно :). Такой замкнутый круг приводит к тому, что машина имеет по диагонали низкое или высокое давление, что тянет ее влево при газе и вправо на тормозе. Так я проездил долго, в принципе подвеска прощала и позволяла через раз выставлять машину ровно чтобы ее не тянуло в стороны. Примерно это выглядело так, в процессе бесконечных решений проблем по аппаротной части. История 2: Переход на датчики высоты. Датчики высоты на первый взгляд решают проблему быстрого набора высоты. Им без разницы под каким напором дунет в них воздух. На кузове моей машины есть 2 штатных датчика, которые управляют автокорректором света, расположены на левой части авто спереди и сзади. На старшем брате этого кузова штатная пневмоподвеска предполагает 4 датчика высоты, ровно такие же, на таких же местах крепления. Я решил немного сэкономить и заказал 2 пары левых датчиков с родного кузова. Перекрутив стойки на датчиках, инвертировал показания. Попытался написать код, который будет рулить клапанами примерно как в истории 1 и уперся опять же в проблему диагоналей. Можно сделать итераций 3-5 и добиться одинаковой высоты на всех колесах, но это время, дерганье машины. Это не стабильно, нет уверенности и чувства, что все работает по штату, хотя этот способ более прост в исполнении и чуть надежнее первого. История 3: Гениальное - просто. Чем проще система, тем она стабильнее. Меньше датчиков, электроники - более предсказуемый результат, меньше ошибок программных, аппаратных. Я поставил обратно штатные стойки. Я оставил штатные левые датчики высоты, как и говорил, один спереди, другой сзади. Добавил между стойками на одной оси перепускной клапан. Работает теперь так: передние стойки одновременно набирают нужную высоту, получая показания высоты только с левого колеса. После набора, открывается перепускной клапан между стойками, который естественным путем выравнивает давление между стойками на одной оси. Тоже самое со стойками сзади. После того, как машина набрала высоту перепускные закрываются и машина имеет точное значение на датчике спереди и при этом равное давление на оси, так же и сзади. Если взять пример, что машина стоит с абсолютно неравным давлением на всех стойках. После первой итерации набора высоты, после выравнивания давления может оказаться, что высота стала чуть ниже, чем задавалась. Но это проблема первой итерации изначально когда машина была с разным давлением на оси. На второй итерации давление на оси будет равное и высота будет ровно той, что мы задаем. Итак, вторая итерация нужна лишь для систем, имеющих утечки воздуха. В остальном, нужна лишь постановка высоты на ровной площадке. Данный набор клапанов исключает перекачивания давления между осями, как в двухконтурной системе, при этом скорость набора высоты остается на уровне 4х контуров. Далее опишу, что контроллер умеет еще, кроме как ровно выставлять любую высоту. При наборе высоты контроллер учитывает показания датчика давления в рессивере, что подсказывает ему, когда нужно включить компрессор и когда выключить. Так же на компрессоре стоит датчик температуры, который дает понять, что лучше докачать позже, когда компрессор остынет. Естественно, контроллер не дает качать при высоких температурах компрессора или, если в рессивере слишком много воздуха. Так сказать, что быстрее наступит. На пневмостойках от старшего брата кузова машины есть регулировки жесткости стоек. Крутится шток, который меняет сечение внутри стойки. Доступно 12 положений на штатном шаговом моторчике. Пока что это ручное управление от мягкого, до зубодробительного. Развитие в этом направлении это либо управление штоком от скорости авто, которое можно брать с датчика абс, либо заменить жопомер жесткости на датчик, считающим редко или часто машина трясется на неровной дороге. Тут в видео, к сожалению, не конечный описанный результат, проявленный в виде кривых надписей и прочих мелких недочетах. Но говорить и строить теории можно долго, а результат я демонстрирую. Сам контроллер в этой стадии живет около года, на нем проехал маршрут с Иркутска до Ростова-на-Дону (~6к км), пережил Иркутские -30 морозы. Переделка пепельницы в блок управления - отдельная тема с подгоном рамки, 3д печатью, упаковывания дисплея и кнопок.
Контроллер прошел через 3 стадии, в каждой истории свои плюсы и минусы. История 1: Изначально это 4х контурная система. Управление происходило путем считывания 4х датчиков давления и еще 1 датчика давления на рессивере. Контроллер считывал показания давления и качал передние стойки, потом одну стойку оставлял в покое, а вторую докачивал. После качал задние по тому же принципу. Сравнять давление клапанами на 8 трубке довольно сложно даже микроконтроллеру. Даже при кратковременном открывании клапана, давление резко выплевывалось в датчик и на этот момент открытия, напряжение (показание) скачет, контроллер понимает, что качать хватит и по закрытию клапана давление получается ниже, чем планировалось установить. Если провести больше итераций на установку определенного давления, в теории можно свести давление по оси в одинаковое значение. А так же программно определив сглаживающий фильтр, можно убрать ступеньку от резкой смены давления. Опять же фильтр должен быть адаптивен к разнице давления рессивера и стойки, адаптивен к разнице фактического давления и устанавливаемого. Напомню, здесь проблема в датчиках давления, которые при открытии клапанов кратковременно дают ложные значения. Тут появляется вторая проблема. Если давление на задней и на передней оси разное. Тогда сравняв давление на переде, при том что давление сзади между стойками разнится, Мы выставляем равное давление сзади, но с этим теряем равенство спереди. Т.к. при разном давлении сзади передняя часть по разному нагружается. Прочтите внимательно :). Такой замкнутый круг приводит к тому, что машина имеет по диагонали низкое или высокое давление, что тянет ее влево при газе и вправо на тормозе. Так я проездил долго, в принципе подвеска прощала и позволяла через раз выставлять машину ровно чтобы ее не тянуло в стороны. Примерно это выглядело так, в процессе бесконечных решений проблем по аппаротной части. История 2: Переход на датчики высоты. Датчики высоты на первый взгляд решают проблему быстрого набора высоты. Им без разницы под каким напором дунет в них воздух. На кузове моей машины есть 2 штатных датчика, которые управляют автокорректором света, расположены на левой части авто спереди и сзади. На старшем брате этого кузова штатная пневмоподвеска предполагает 4 датчика высоты, ровно такие же, на таких же местах крепления. Я решил немного сэкономить и заказал 2 пары левых датчиков с родного кузова. Перекрутив стойки на датчиках, инвертировал показания. Попытался написать код, который будет рулить клапанами примерно как в истории 1 и уперся опять же в проблему диагоналей. Можно сделать итераций 3-5 и добиться одинаковой высоты на всех колесах, но это время, дерганье машины. Это не стабильно, нет уверенности и чувства, что все работает по штату, хотя этот способ более прост в исполнении и чуть надежнее первого. История 3: Гениальное - просто. Чем проще система, тем она стабильнее. Меньше датчиков, электроники - более предсказуемый результат, меньше ошибок программных, аппаратных. Я поставил обратно штатные стойки. Я оставил штатные левые датчики высоты, как и говорил, один спереди, другой сзади. Добавил между стойками на одной оси перепускной клапан. Работает теперь так: передние стойки одновременно набирают нужную высоту, получая показания высоты только с левого колеса. После набора, открывается перепускной клапан между стойками, который естественным путем выравнивает давление между стойками на одной оси. Тоже самое со стойками сзади. После того, как машина набрала высоту перепускные закрываются и машина имеет точное значение на датчике спереди и при этом равное давление на оси, так же и сзади. Если взять пример, что машина стоит с абсолютно неравным давлением на всех стойках. После первой итерации набора высоты, после выравнивания давления может оказаться, что высота стала чуть ниже, чем задавалась. Но это проблема первой итерации изначально когда машина была с разным давлением на оси. На второй итерации давление на оси будет равное и высота будет ровно той, что мы задаем. Итак, вторая итерация нужна лишь для систем, имеющих утечки воздуха. В остальном, нужна лишь постановка высоты на ровной площадке. Данный набор клапанов исключает перекачивания давления между осями, как в двухконтурной системе, при этом скорость набора высоты остается на уровне 4х контуров. Далее опишу, что контроллер умеет еще, кроме как ровно выставлять любую высоту. При наборе высоты контроллер учитывает показания датчика давления в рессивере, что подсказывает ему, когда нужно включить компрессор и когда выключить. Так же на компрессоре стоит датчик температуры, который дает понять, что лучше докачать позже, когда компрессор остынет. Естественно, контроллер не дает качать при высоких температурах компрессора или, если в рессивере слишком много воздуха. Так сказать, что быстрее наступит. На пневмостойках от старшего брата кузова машины есть регулировки жесткости стоек. Крутится шток, который меняет сечение внутри стойки. Доступно 12 положений на штатном шаговом моторчике. Пока что это ручное управление от мягкого, до зубодробительного. Развитие в этом направлении это либо управление штоком от скорости авто, которое можно брать с датчика абс, либо заменить жопомер жесткости на датчик, считающим редко или часто машина трясется на неровной дороге. Тут в видео, к сожалению, не конечный описанный результат, проявленный в виде кривых надписей и прочих мелких недочетах. Но говорить и строить теории можно долго, а результат я демонстрирую. Сам контроллер в этой стадии живет около года, на нем проехал маршрут с Иркутска до Ростова-на-Дону (~6к км), пережил Иркутские -30 морозы. Переделка пепельницы в блок управления - отдельная тема с подгоном рамки, 3д печатью, упаковывания дисплея и кнопок.